In this book, we present the detailed design of mechanical walking robots that are driven by a single motor. These walkers rely on specially designed leg mechanisms coordinated by gear trains in order to walk, rather than multiple computer controlled motors per leg. The result is a simplified walking robot that provides a platform for other mechanical and electronic functions.
Two, four and six legged walkers are presented that implement different types of leg mechanisms and power trains. In each case, we provide drawings for a laser cut wood or acrylic chassis, 3D printed parts and a complete parts list. Several of the designs implement an additional motor for steering as well as electronic components and software for speed control.
Our goal is to provide enthusiasts of all backgrounds what they need to build a walking robot at home, to explore new design ideas, and, perhaps, to enjoy the operation of one of these robots as it moves across the ground.
I am pleased to provide the presentations from the 2012 National Science Foundation Workshop on 21st Century Kinematics. These presentations provide insight to the challenges and opportunities for research in mechanical systems and robotics.
The NSF Workshop on 21st Century Kinematics at the 2012 ASME IDETC Conference in Chicago, IL on August 11-12, 2012 consisted of a series of presentations and a book of supporting material prepared by the workshop contributors.
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.24.54-PM.png8321206Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2020-07-19 17:31:112020-07-19 17:33:27The Bored Robot: Controlling Two Drive Motors for a Walking Machine
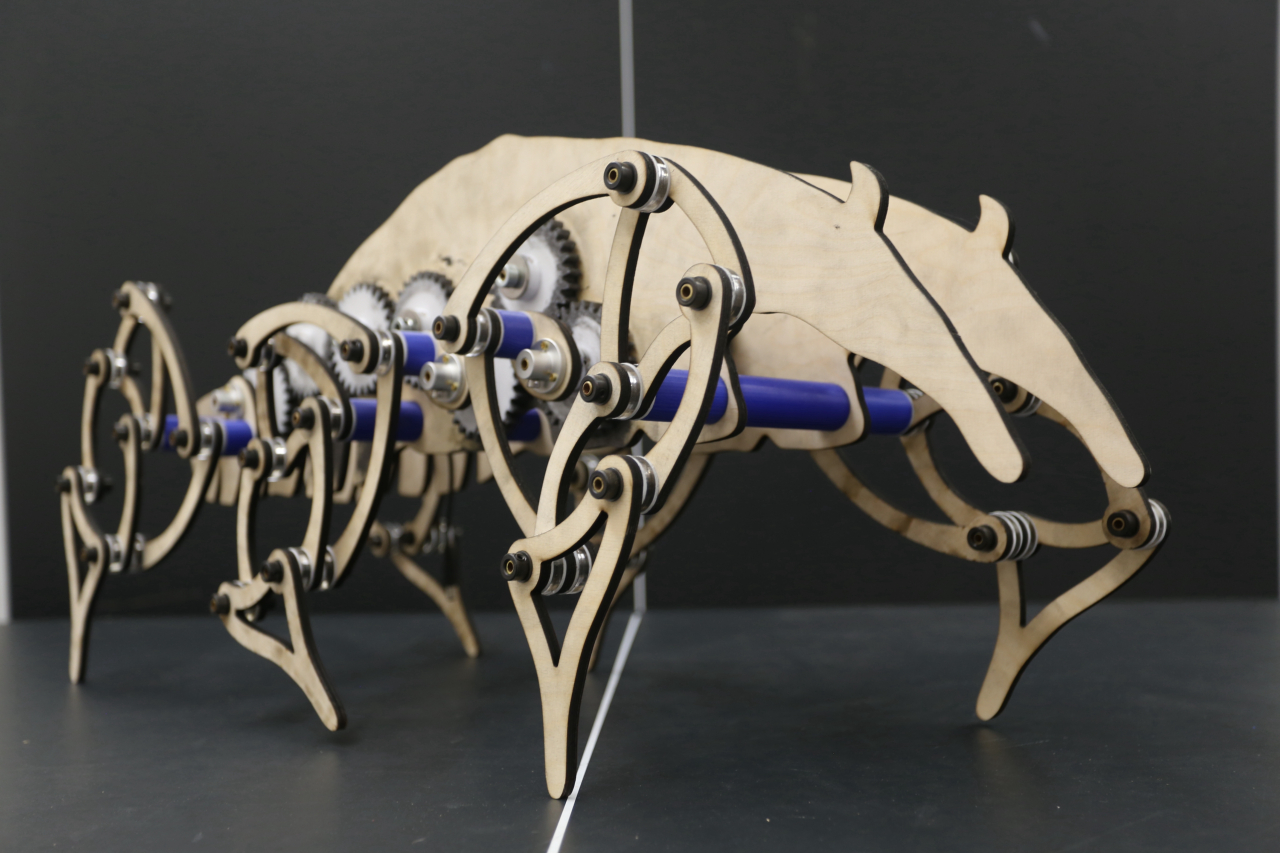
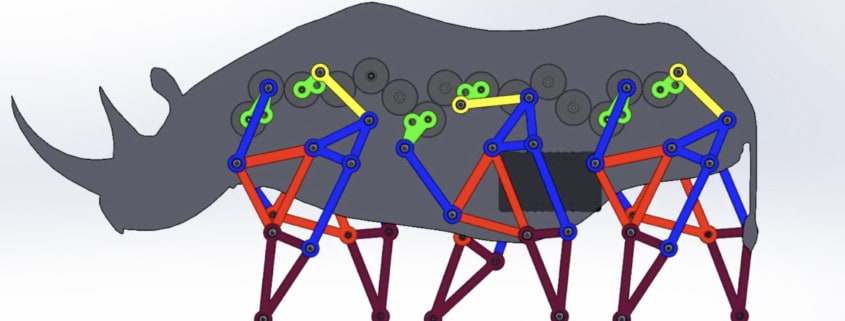
The design and assembly of our four-legged mechanical walkers can yield single degree-of-freedom systems with so many redundant mates that it stalls SolidWorks’ Motion Analysis. For example, the walker shown in Figure 1 had 782 redundant mates. The procedure outlined below reduced the number of redundant mates to 114, and Motion Analysis executed efficiently.
Figure 1. A four-legged mechanical walker consisting of a body, drive train, and four-leg mechanisms.
Our walker consists of a body, drive train, and four legs. The legs mechanisms are identical but assembled as front-to-back mirror images. The component parts of this walker mates were assembled using mates to align and coordinate various subassemblies, resulting in a large number of redundant mates.
In order to reduce the number of redundant mates, we dissolve the subassemblies, combine rigid elements, and mate new subassemblies as follows.
Step 1
Dissolve all of the subassemblies in the walker. To do this, hover over each assembly and select the menu item Dissolve Assembly. See Figure 1.
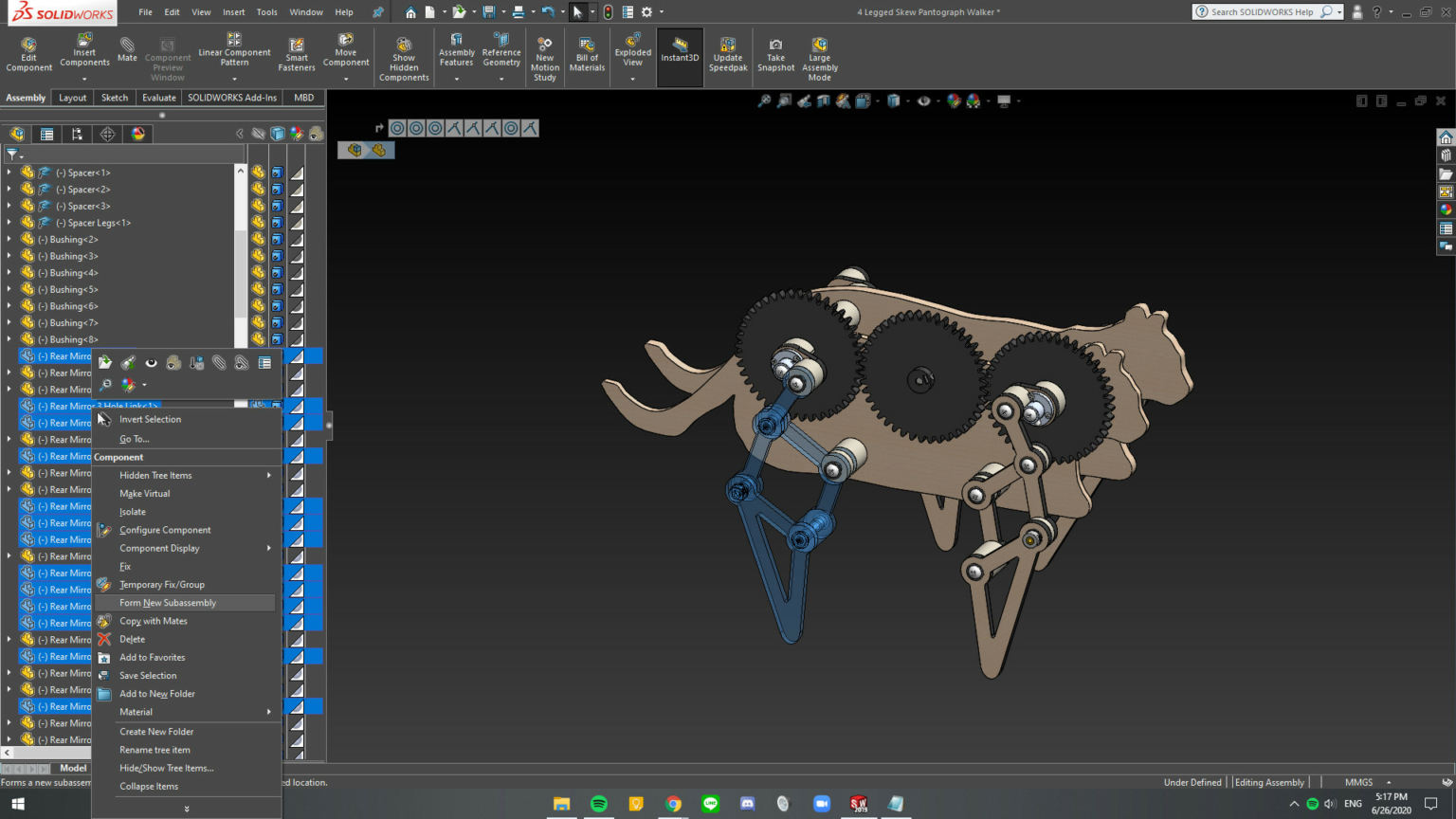
Figure 2. Selected parts for new subassembly.
Step 2
Form new subassemblies for each leg, the drive train, and the body. See Figure 2. To do this, first, hover over the part, press “tab” to hide the part in order to identify it easily; and then, select all of the hidden parts, and right-click to open menu and select Form New Subassembly.
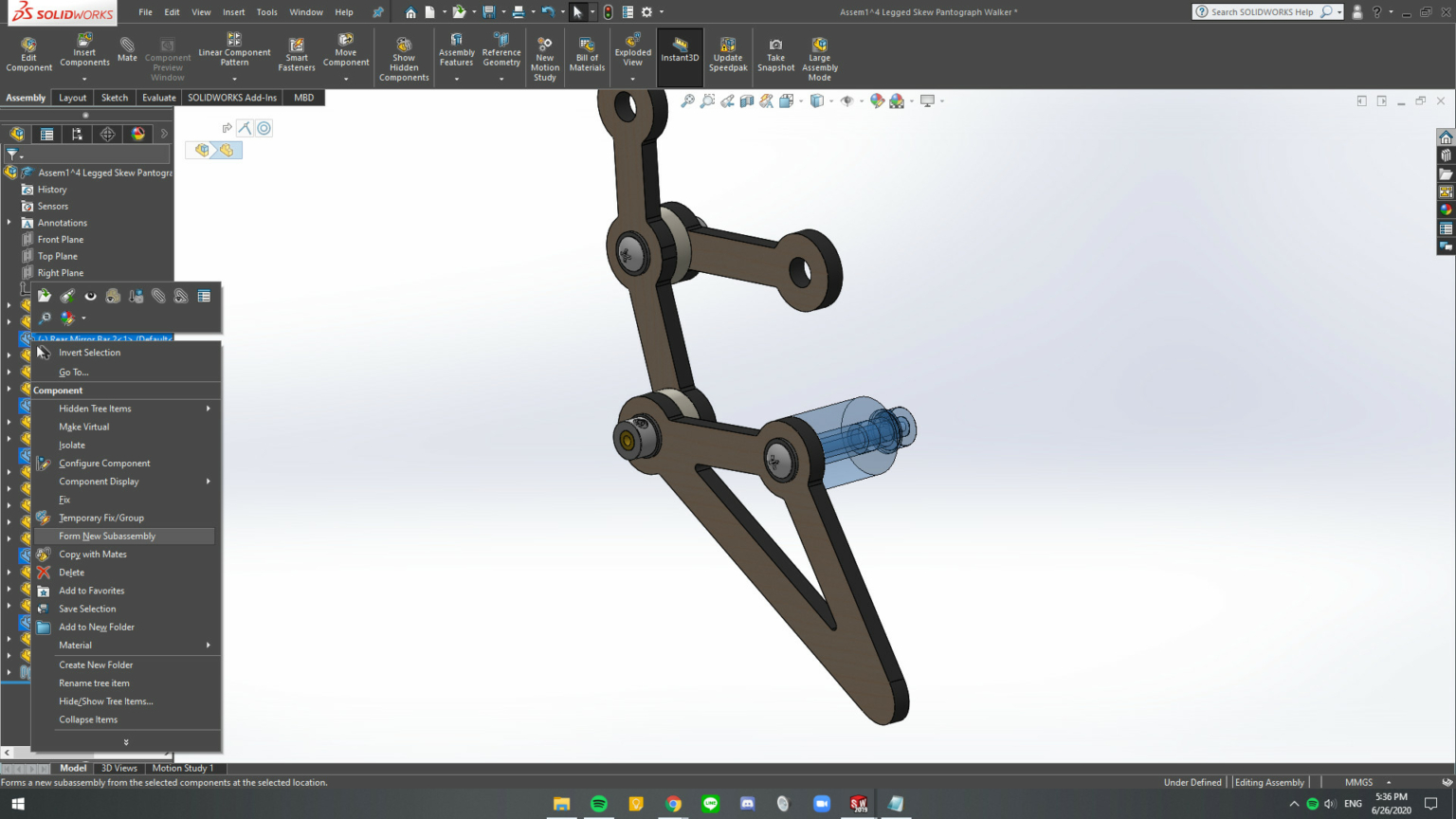
Figure 3. Within each new subassembly form subassemblies of parts that do not move relative to each other.
Step 3
Within each new subassembly combine parts that do not move relative to each other. See Figure 3. The tree structure should consist of separate assemblies of rigid elements with the remaining mates between the assemblies. See Figure 4.
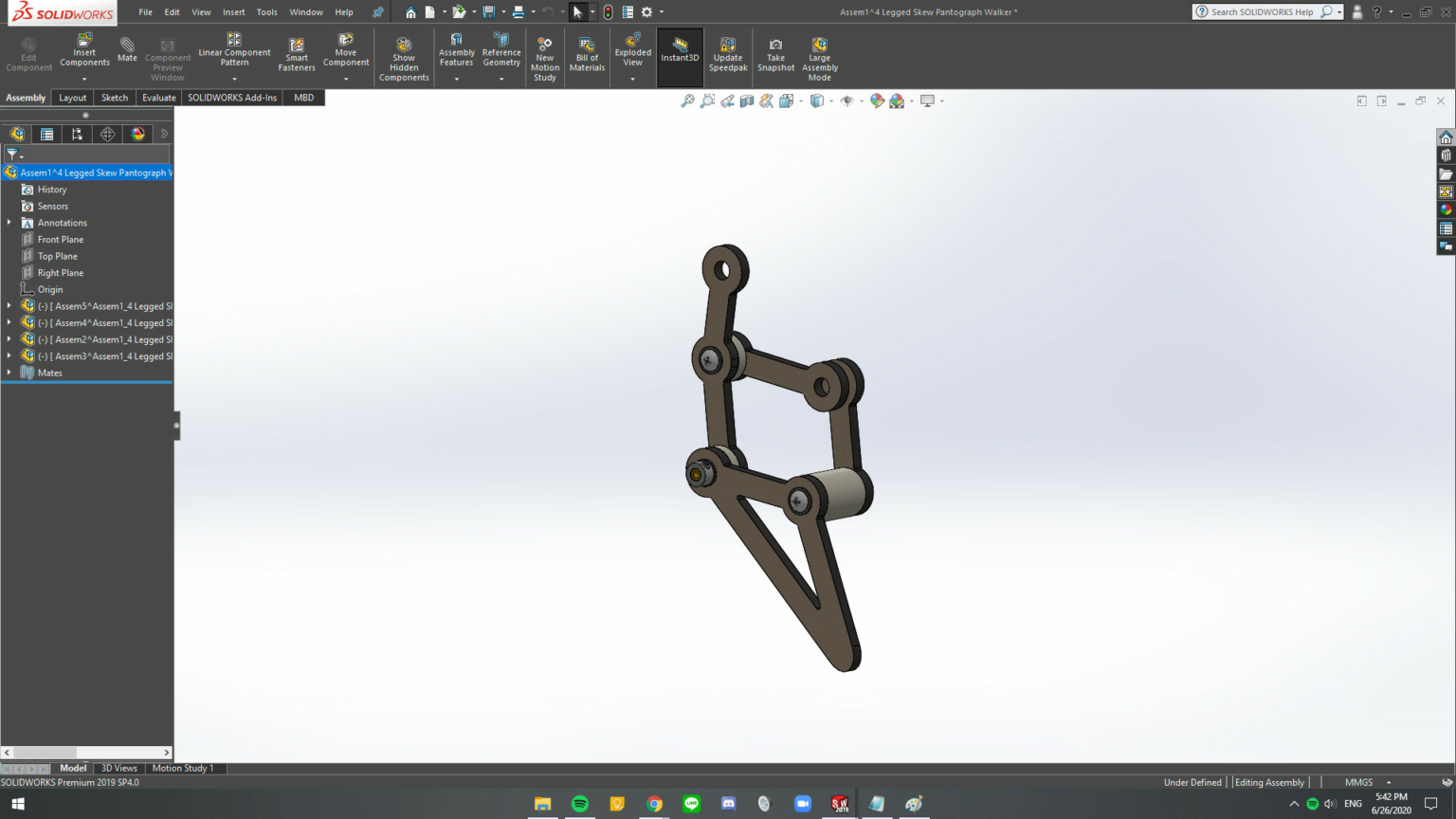
Figure 4. The assembly should consist of subassemblies that move as rigid elements relative to each other.
Step 4
Repeat Step 3 for all of the new subassemblies. The result is shown in Figure 5.
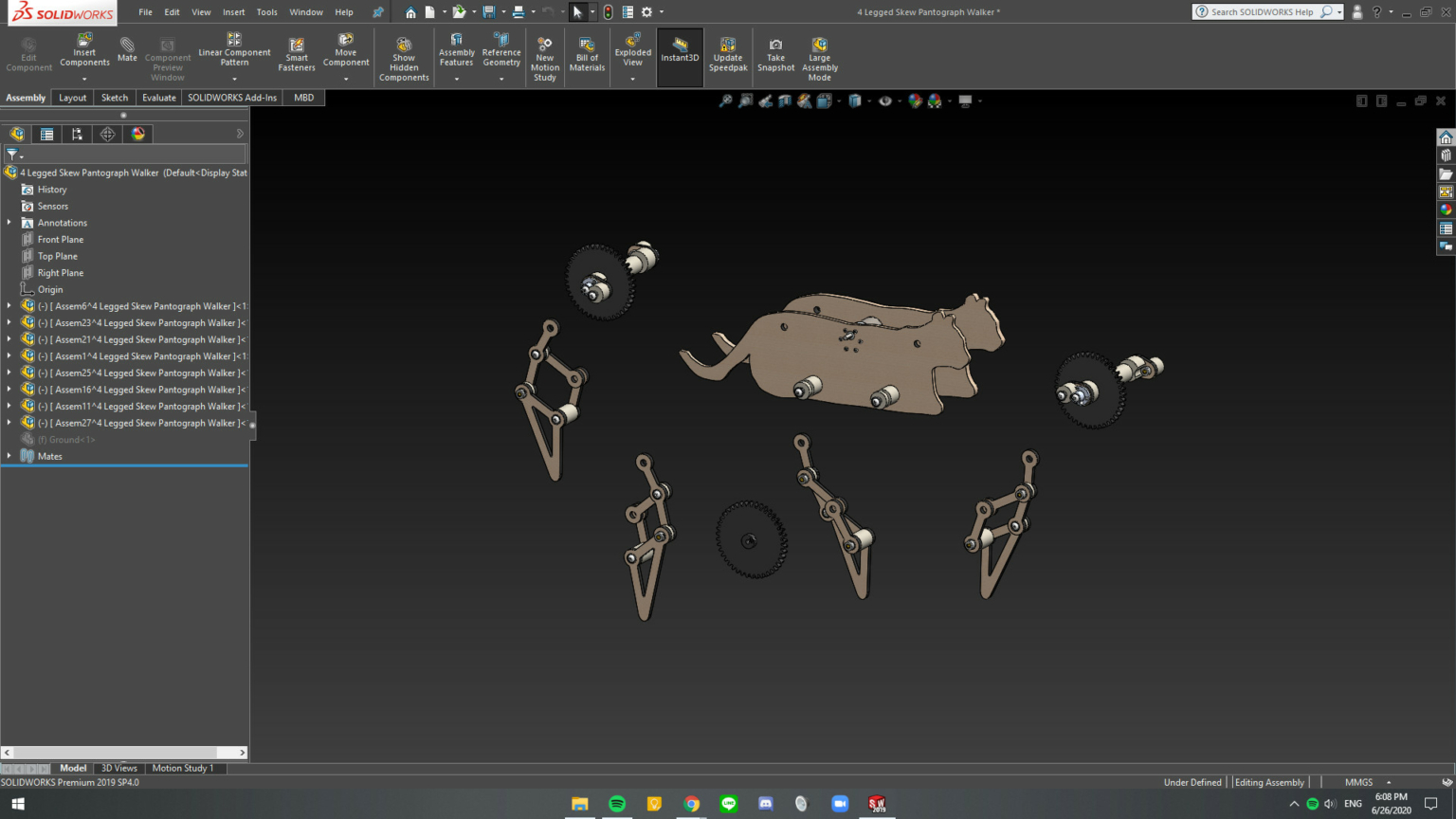
Figure 5. The subassemblies that define the mechanical walker. Notice that the tree structure consists of subassemblies and no individual parts.
Step 5
Delete the mates in the main assembly. Introduce the mates required for movement using hinge mates, rather than coincident or concentric mates, where possible.
Step 6
Make the subassemblies at the top-level flexible. Right-click on the assembly and select the flexible assembly icon .
The result of this procedure is a system with 114 redundant mates that Motion Analysis can process effectively. The result is that animation shown below.
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.12.37-PM.png7991600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2020-07-19 17:15:522020-07-19 17:39:58How to Fix SW Motion Analysis Error: Too Many Redundant Constraints
While isolated to slow infections of the Coronavirus, over 60 UCI students learned how to apply the principles of Curvature Theory and Finite-Position Synthesis to the design leg mechanisms for mechanical walkers.
Their first team project was a four-legged walker that used the coupler curve of a four-bar linkage positioned using a skew-pantograph as the foot trajectory. Here are videos that show animations of their walkers
This is the first video:
And this is the second:
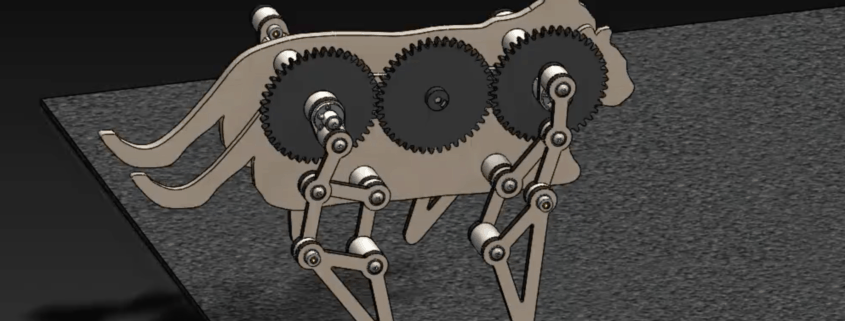
The final team project used finite-position synthesis to design function generators to drive the hip and knee joints and guide the foot trajectory. This mechanism is a generalization of the Jansen leg mechanism. Teams of three students designed the leg mechanism, the drive system and assembled them into a six-legged walker. Here are the videos of these walkers.
This is the first video:
And this is the second video:
The variety of these walkers show the versatility of the kinematic synthesis procedures, as well as the creativity of the students. It was a pleasure working with the students on these projects even with the challenges of remote instruction.
https://mechanicaldesign101.com/wp-content/uploads/2020/06/Six-legged-walker-team-12.jpg6741600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2020-06-15 13:52:472020-06-15 13:55:03The Design of Mechanical Walkers: Spring 2020 Student Projects
Here are videos of the designs for the four legged mechanical walkers obtained by Teams 2, 4 an 5. This is the final project in my Fall 2019 Kinematic Synthesis course.
Team2
Mechanical Walker Team 2
Team 4
Mechanical Walker Team 4
Team 5
Mechanical Walker Team 5
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-13-at-1.48.24-PM.jpg7771600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2019-12-13 13:51:112020-06-15 14:16:07Four-legged Mechanical Walkers: Teams 2, 4 and 5
Here are videos of the designs for the four legged mechanical walkers obtained by Teams 1, 3 an 6. This is the final project in my Fall 2019 Kinematic Synthesis course.
Team 1
Mechanical Walker designed by Team 1.
Team 3
Mechanical Walker designed by Team 3
Team 6
Mechanical Walker designed by Team 6.
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-08-at-1.02.45-PM.jpg8061600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2019-12-08 13:05:322019-12-08 13:07:54Four Legged Mechanical Walker: Teams 1, 3 and 6
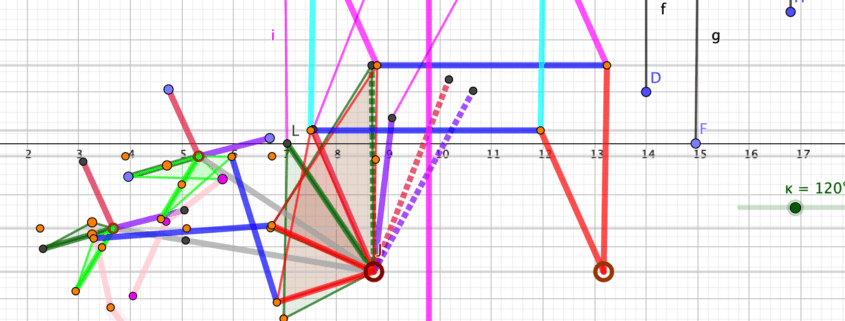
Specify three positions for the foot of a leg consisting of a hip and knee joint;
Use three position synthesis to design a four-bar function generator to guide the hip joint;
Then use three position synthesis to design a second four-bar function generator to guide the knee joint;
And finally assemble the linkage to determine the trajectory of the foot. Adjusting the lengths of the leg segments, the position of the hip, the specified positions of the input cranks, and the position of the coupler attachments to the input cranks vary the resulting foot trajectory. An example leg mechanism is shown at the end of this video.
Part 1:4 Setting up the design
Part 2:4 Synthesis of the hip function generator.
Part 3:4 Synthesis of the knee function generator.
Part 4:4 Assembly of the leg mechanism, exploration of design variations, and an example final leg design.
https://mechanicaldesign101.com/wp-content/uploads/2019/05/Screen-Shot-2019-05-23-at-4.16.12-PM.png10411600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2019-05-23 16:27:142019-05-25 12:37:37Construction of a Leg Mechanism
Prof Haijun Su at Ohio State University had his students design walking machines for their final project in ME 5751. Here are videos of four project teams from that event.
Team A:
Team B:
Team C:
Team D:
https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-16-at-2.20.21-PM.jpg7401304Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2019-04-16 14:22:582019-05-25 12:08:24Walking Machine Class Projects: Ohio State ME 5751

 MDA
MDA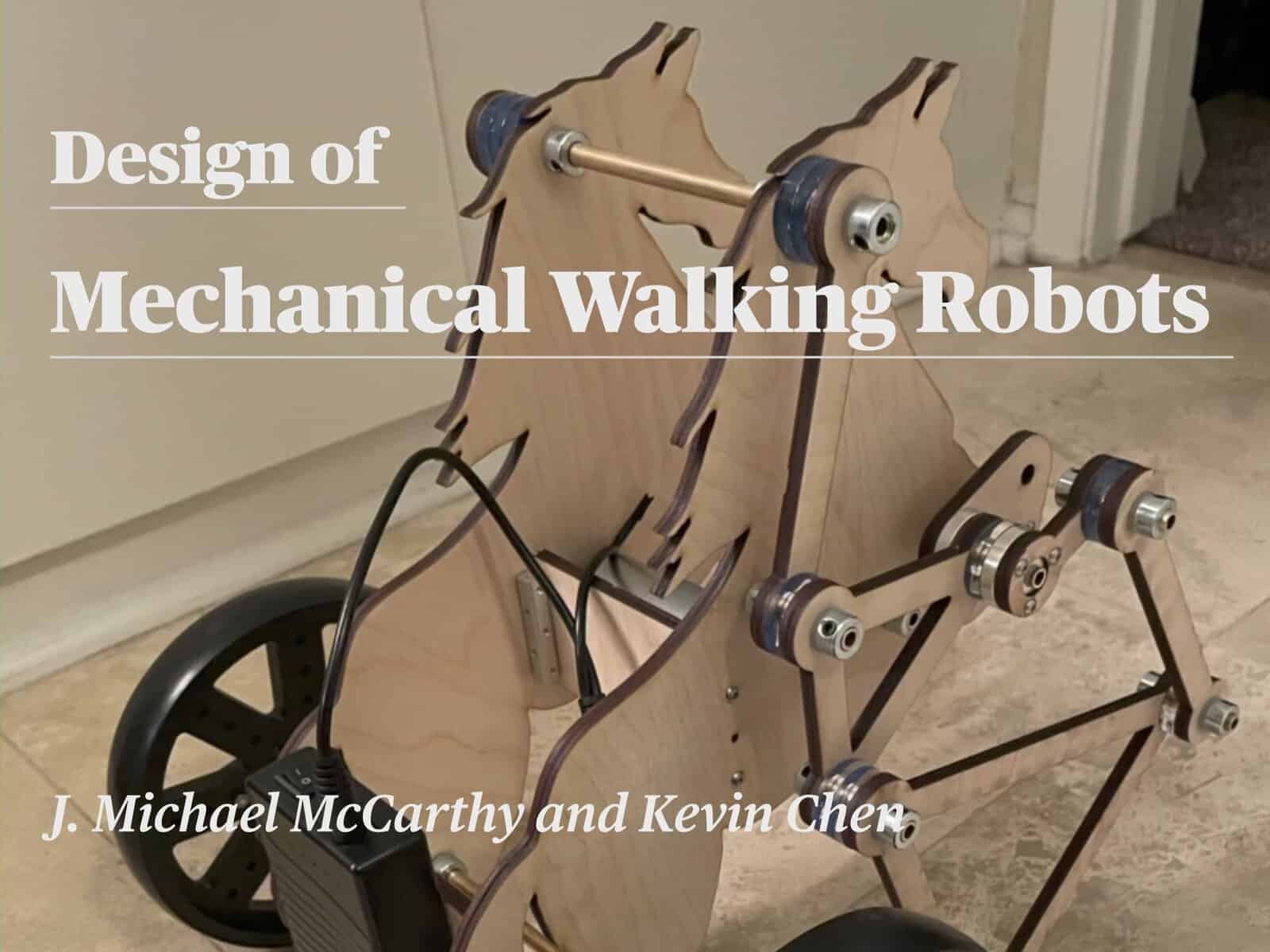
 MDA
MDA
 MDA Press
MDA Press
 MDA
MDA MDA
MDA MDA
MDA
 JMM
JMM