
Robotics
 MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2025/02/Car-Door-Linkage-scaled.jpg
1545
2560
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
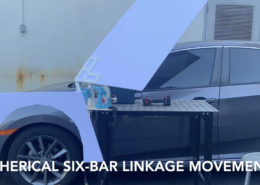
Prof. McCarthy2025-02-24 16:13:192025-02-24 16:14:21Innovative Car Door Linkage
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2025/02/Car-Door-Linkage-scaled.jpg
1545
2560
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2025-02-24 16:13:192025-02-24 16:14:21Innovative Car Door Linkage MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2025/01/Jewelry-Boxes.jpg
896
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2025-01-03 16:23:482025-01-03 16:23:51Spherical Linkage Opening a Jewelry Box
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2025/01/Jewelry-Boxes.jpg
896
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2025-01-03 16:23:482025-01-03 16:23:51Spherical Linkage Opening a Jewelry Box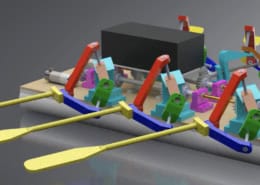 MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2024/11/Six-Oar-Trimaran-scaled.jpg
599
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2024-11-22 14:22:442024-11-22 14:23:49Swimming Robot
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2024/11/Six-Oar-Trimaran-scaled.jpg
599
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2024-11-22 14:22:442024-11-22 14:23:49Swimming Robot https://mechanicaldesign101.com/wp-content/uploads/2024/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2024-11-22 11:37:402024-11-22 11:37:40Oar-Driven Unmanned Surface Vehicle
https://mechanicaldesign101.com/wp-content/uploads/2024/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2024-11-22 11:37:402024-11-22 11:37:40Oar-Driven Unmanned Surface Vehicle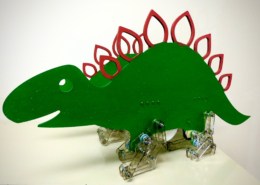 MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/12/a-Stegosaurus.jpeg
1073
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-12-19 07:38:292023-12-19 07:38:33Eight Legs, Two Motors and a Lot of Personality
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/12/a-Stegosaurus.jpeg
1073
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-12-19 07:38:292023-12-19 07:38:33Eight Legs, Two Motors and a Lot of Personality MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/12/IMG_5552-scaled.jpeg
1200
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-12-17 09:30:122023-12-17 09:30:16Jiaji Li’s Robotic Rowboat
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/12/IMG_5552-scaled.jpeg
1200
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-12-17 09:30:122023-12-17 09:30:16Jiaji Li’s Robotic Rowboat MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/10/BYU-Zoom-Lecture.jpg
691
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-10-18 11:27:502023-10-19 08:57:06Quaternions in Kinematics: BYU Lecture
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/10/BYU-Zoom-Lecture.jpg
691
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-10-18 11:27:502023-10-19 08:57:06Quaternions in Kinematics: BYU Lecture MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/09/Ruiqi-Walker.png
662
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-09-04 17:27:572023-09-04 20:18:14Ruiqi Mao’s Panda Walker
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/09/Ruiqi-Walker.png
662
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-09-04 17:27:572023-09-04 20:18:14Ruiqi Mao’s Panda Walker MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/08/Mini-Starship-2.png
448
1198
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-08-25 16:25:072023-08-25 20:53:58The Mini Starship Delivery Robot
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/08/Mini-Starship-2.png
448
1198
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-08-25 16:25:072023-08-25 20:53:58The Mini Starship Delivery Robot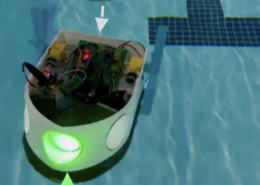 https://mechanicaldesign101.com/wp-content/uploads/2023/08/Screenshot-2023-08-15-at-11.34.32-AM.png
874
1646
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-08-15 11:45:482023-08-15 11:48:242023 Southern California Robotics Symposium
https://mechanicaldesign101.com/wp-content/uploads/2023/08/Screenshot-2023-08-15-at-11.34.32-AM.png
874
1646
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-08-15 11:45:482023-08-15 11:48:242023 Southern California Robotics Symposium MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/07/Screenshot-2023-07-03-at-2.46.02-PM.png
676
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-07-03 14:52:202023-07-03 15:06:2215 Terrific Robot Walkers
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/07/Screenshot-2023-07-03-at-2.46.02-PM.png
676
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-07-03 14:52:202023-07-03 15:06:2215 Terrific Robot Walkers MDA
https://mechanicaldesign101.com/wp-content/uploads/2023/03/IMG_0668-scaled.jpeg
2560
1920
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-03-14 07:36:052023-03-14 07:36:25GNK Steerable Robot Walker
MDA
https://mechanicaldesign101.com/wp-content/uploads/2023/03/IMG_0668-scaled.jpeg
2560
1920
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-03-14 07:36:052023-03-14 07:36:25GNK Steerable Robot Walker https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker
https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators
https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 13:47:252023-01-01 13:47:25Kinematics Lecture: Six-bar and Eight-bar Linkage Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 13:47:252023-01-01 13:47:25Kinematics Lecture: Six-bar and Eight-bar Linkage Synthesis https://mechanicaldesign101.com/wp-content/uploads/2021/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-12-03 16:13:322022-09-17 09:25:53Fall 2021 Mechanical Walker Designs
https://mechanicaldesign101.com/wp-content/uploads/2021/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-12-03 16:13:322022-09-17 09:25:53Fall 2021 Mechanical Walker Designs https://mechanicaldesign101.com/wp-content/uploads/2016/06/MechGenSP-ipad-1.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-10-28 09:30:282021-12-03 15:50:54MechGen Software Privacy Policy
https://mechanicaldesign101.com/wp-content/uploads/2016/06/MechGenSP-ipad-1.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-10-28 09:30:282021-12-03 15:50:54MechGen Software Privacy Policy MDA
https://mechanicaldesign101.com/wp-content/uploads/2021/09/Anteater-Walker-pdf.jpg
853
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-09-17 16:13:462021-09-17 16:36:20Design of Mechanical Walking Robots
MDA
https://mechanicaldesign101.com/wp-content/uploads/2021/09/Anteater-Walker-pdf.jpg
853
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-09-17 16:13:462021-09-17 16:36:20Design of Mechanical Walking Robots https://mechanicaldesign101.com/wp-content/uploads/2021/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-06-07 13:19:352022-09-17 09:25:54Wing Mechanisms
https://mechanicaldesign101.com/wp-content/uploads/2021/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-06-07 13:19:352022-09-17 09:25:54Wing Mechanisms MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.24.54-PM.png
832
1206
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:31:112020-07-19 17:33:27The Bored Robot: Controlling Two Drive Motors for a Walking Machine
MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.24.54-PM.png
832
1206
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:31:112020-07-19 17:33:27The Bored Robot: Controlling Two Drive Motors for a Walking Machine MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.12.37-PM.png
799
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:15:522020-07-19 17:39:58How to Fix SW Motion Analysis Error: Too Many Redundant Constraints
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.12.37-PM.png
799
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:15:522020-07-19 17:39:58How to Fix SW Motion Analysis Error: Too Many Redundant Constraints https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-19 16:58:302022-09-17 09:25:54Six-Legged Mechanical Walkers: Spring 2020 Highlights
https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-19 16:58:302022-09-17 09:25:54Six-Legged Mechanical Walkers: Spring 2020 Highlights https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-18 17:35:172022-09-17 09:25:54Prototype Four-Legged Mechanical Walker
https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-18 17:35:172022-09-17 09:25:54Prototype Four-Legged Mechanical Walker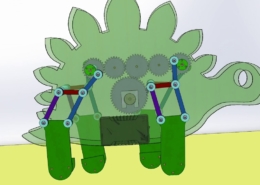 https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-17 14:19:492022-09-17 09:25:54Four-Legged Mechanical Walkers: Spring 2020 Highlights
https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-17 14:19:492022-09-17 09:25:54Four-Legged Mechanical Walkers: Spring 2020 Highlights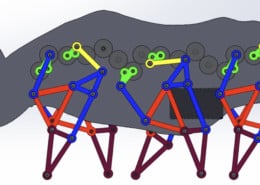 MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/06/Six-legged-walker-team-12.jpg
674
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-15 13:52:472020-06-15 13:55:03The Design of Mechanical Walkers: Spring 2020 Student Projects
MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/06/Six-legged-walker-team-12.jpg
674
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-15 13:52:472020-06-15 13:55:03The Design of Mechanical Walkers: Spring 2020 Student Projects https://mechanicaldesign101.com/wp-content/uploads/2019/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 14:04:082022-09-17 09:25:54Fall 2019 Mechanical Walker Prototypes
https://mechanicaldesign101.com/wp-content/uploads/2019/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 14:04:082022-09-17 09:25:54Fall 2019 Mechanical Walker Prototypes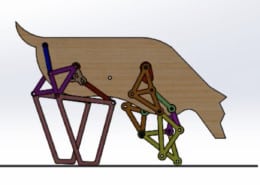 MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-13-at-1.48.24-PM.jpg
777
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 13:51:112020-06-15 14:16:07Four-legged Mechanical Walkers: Teams 2, 4 and 5
MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-13-at-1.48.24-PM.jpg
777
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 13:51:112020-06-15 14:16:07Four-legged Mechanical Walkers: Teams 2, 4 and 5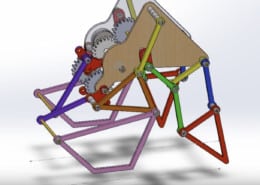 MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-08-at-1.02.45-PM.jpg
806
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-08 13:05:322019-12-08 13:07:54Four Legged Mechanical Walker: Teams 1, 3 and 6
MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-08-at-1.02.45-PM.jpg
806
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-08 13:05:322019-12-08 13:07:54Four Legged Mechanical Walker: Teams 1, 3 and 6 https://mechanicaldesign101.com/wp-content/uploads/2019/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-11-02 09:16:342022-09-17 09:25:54Halloween Display 2019
https://mechanicaldesign101.com/wp-content/uploads/2019/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-11-02 09:16:342022-09-17 09:25:54Halloween Display 2019 https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 21:52:562022-09-17 09:25:54More Halloween Linkage Designs
https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 21:52:562022-09-17 09:25:54More Halloween Linkage Designs https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 13:53:042022-09-17 09:25:54Halloween Design Project
https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 13:53:042022-09-17 09:25:54Halloween Design Project https://mechanicaldesign101.com/wp-content/uploads/2019/06/Screen-Shot-2019-06-06-at-2.59.20-PM.jpg
1147
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-06-06 15:01:212019-12-06 09:17:44Mechanical Walker Project Animations: Spring 2019
https://mechanicaldesign101.com/wp-content/uploads/2019/06/Screen-Shot-2019-06-06-at-2.59.20-PM.jpg
1147
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-06-06 15:01:212019-12-06 09:17:44Mechanical Walker Project Animations: Spring 2019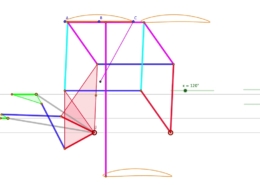 https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-23 16:52:012022-09-17 09:25:54Leg Mechanism for a Mechanical Walker
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-23 16:52:012022-09-17 09:25:54Leg Mechanism for a Mechanical Walker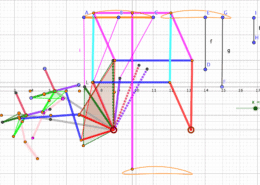 JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/05/Screen-Shot-2019-05-23-at-4.16.12-PM.png
1041
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-23 16:27:142019-05-25 12:37:37Construction of a Leg Mechanism
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/05/Screen-Shot-2019-05-23-at-4.16.12-PM.png
1041
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-23 16:27:142019-05-25 12:37:37Construction of a Leg Mechanism https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-15 11:42:172022-09-17 09:25:54Construction for Three-Position Synthesis of a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-15 11:42:172022-09-17 09:25:54Construction for Three-Position Synthesis of a Four-Bar LinkageMicro-linkages for Compliant Material
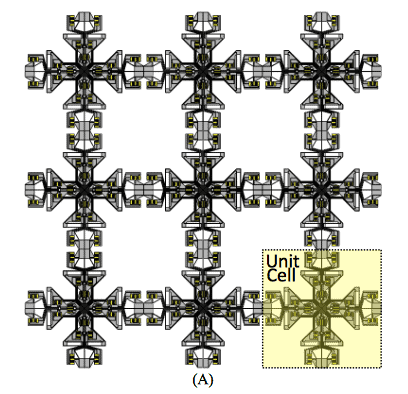
Material Unit Cell
Lucas Shaw and Prof. Jonathan Hopkins show the micro-architecture of an actively compliant material. Micro-actuators within the unit cells of an assembly are coordinated to reshape the assembly as desired. This was presented as part of the 2015 ASME Design Engineering Technical Conferences in Boston, MA, August 2-5. The video below shows what this assembly can do.
[youtube]https://www.youtube.com/watch?v=pPXMtlP_OAQ[/youtube]
Actuating Morphing Linkages
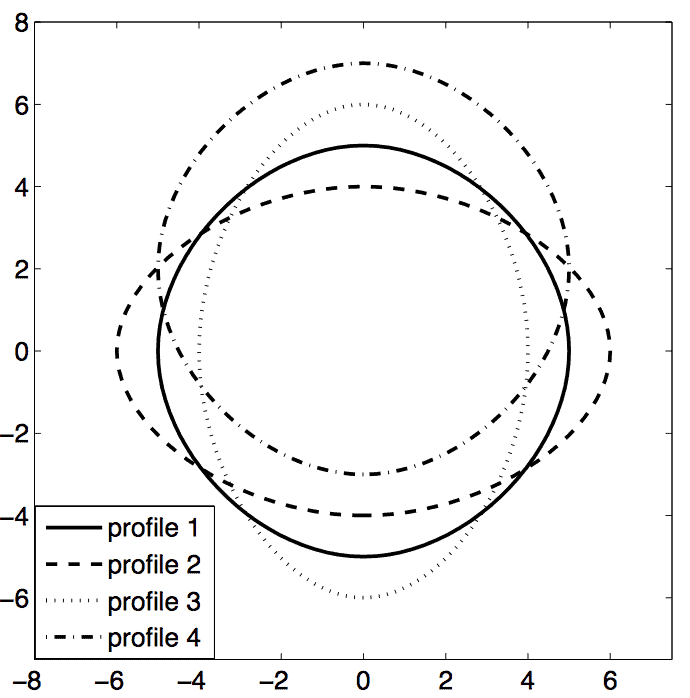
Target Profiles for Morphing Linkage
Lawrence Funke and Prof. James Schmiedeler of the University of Notre Dame Locomotion and Biomechanics Lab show that the movement of a morphing linkage through its target profiles can be improved by coordinating actuation of the sub-chains. This was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. The video below shows the improvement obtained by moving from 1 to 3 coordinated actuators.
[youtube]https://www.youtube.com/watch?v=r3DwHyRAh08[/youtube]
Rolling Robot at SUTD
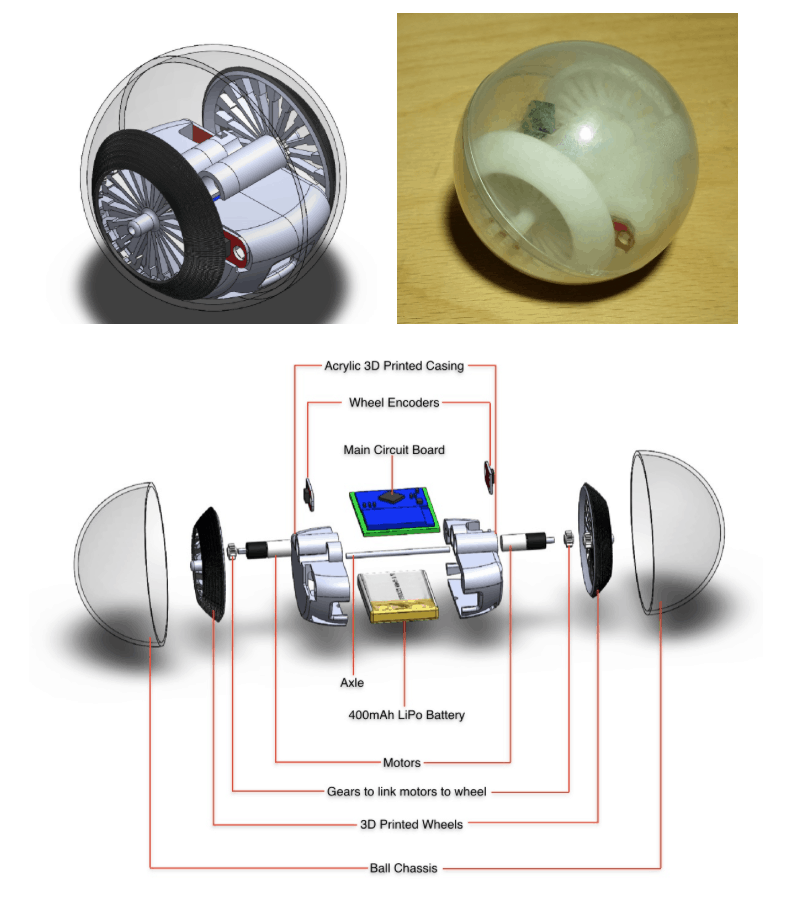
Virgo 2 SUTD
A research team including Profs. GimSong Soh, Kristin Wood and Kevin Otto at Robotics Innovation Lab at the Singapore University of Technology and Design has developed a rolling robot about the size of a baseball. The design and motion planning of this robot, Virgo 2.0, was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. A demonstration of the Virgo 2.0 moving through a figure eight path around obstacles is shown in the video below.
[youtube]https://www.youtube.com/watch?v=z9nZbOlhSqw[/youtube]
Interesting Planar Robot at Laval
[youtube]https://www.youtube.com/watch?v=_vp1ELEtDN4[/youtube]
Students of Prof. Clement Gosselin at the Laval University Robotics Laboratory demonstrate a four-degree of freedom planar robot. I particularly like the demonstration of its use as a gripper that does a cartwheel just for fun.
Tensegrity Robotics at UC Berkeley
[youtube]https://www.youtube.com/watch?v=ZwYXfijMet0[/youtube]
Students in Prof. Alice Agogino’s Berkeley Emergent Space Technologies Laboratory, the BEST Lab, working on motion planning for their tensegrity robot.
Origami Art at BYU

Origami Art BYU
Mechanical engineering students in Prof. Larry Howell’s Compliant Mechanisms Research Group designed and constructed this kinetic structure for the BYU Museum of Art. It illustrates paper folding known as origami.
[youtube]https://www.youtube.com/watch?v=5e28J066oGY[/youtube]