
Robotics
 https://mechanicaldesign101.com/wp-content/uploads/2012/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
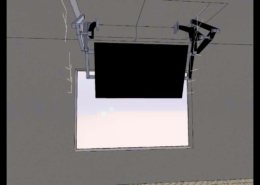
Prof. McCarthy2012-12-23 02:57:372022-09-17 09:25:56Brendan Smith’s Monitor Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 02:57:372022-09-17 09:25:56Brendan Smith’s Monitor Linkage https://mechanicaldesign101.com/wp-content/uploads/2012/12/Spoiler-Linkage.jpg
339
861
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 02:49:282017-01-29 13:02:31Adam Shutt’s Automotive Spoiler Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/12/Spoiler-Linkage.jpg
339
861
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 02:49:282017-01-29 13:02:31Adam Shutt’s Automotive Spoiler Linkage https://mechanicaldesign101.com/wp-content/uploads/2012/12/bookcase.jpg
442
1090
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 02:22:102017-02-02 21:53:20Yang Liu’s Bookcase Linkages
https://mechanicaldesign101.com/wp-content/uploads/2012/12/bookcase.jpg
442
1090
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 02:22:102017-02-02 21:53:20Yang Liu’s Bookcase Linkages https://mechanicaldesign101.com/wp-content/uploads/2012/11/Kassim-Eightbar.jpg
580
912
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-20 06:20:042017-02-02 22:06:55Kassim’s Eight-bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/11/Kassim-Eightbar.jpg
580
912
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-20 06:20:042017-02-02 22:06:55Kassim’s Eight-bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2012/11/Folding-handle.jpg
566
1146
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-13 17:01:492017-02-02 22:10:55Six-bar folding handle
https://mechanicaldesign101.com/wp-content/uploads/2012/11/Folding-handle.jpg
566
1146
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-13 17:01:492017-02-02 22:10:55Six-bar folding handle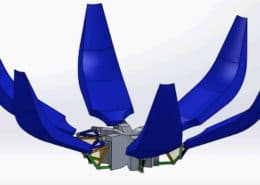 https://mechanicaldesign101.com/wp-content/uploads/2012/11/Flower-linkage.jpg
556
1244
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-04 02:19:502017-02-02 22:15:21Six-bar flower
https://mechanicaldesign101.com/wp-content/uploads/2012/11/Flower-linkage.jpg
556
1244
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-04 02:19:502017-02-02 22:15:21Six-bar flower https://mechanicaldesign101.com/wp-content/uploads/2012/11/Butterfly-six-bar.jpg
544
1006
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-04 02:14:362017-02-02 22:19:56Six-bar butterfly
https://mechanicaldesign101.com/wp-content/uploads/2012/11/Butterfly-six-bar.jpg
544
1006
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-11-04 02:14:362017-02-02 22:19:56Six-bar butterfly https://mechanicaldesign101.com/wp-content/uploads/2012/10/Another-Flower.jpg
548
1164
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-24 16:38:252017-02-02 22:28:23Another four-bar linkage flower
https://mechanicaldesign101.com/wp-content/uploads/2012/10/Another-Flower.jpg
548
1164
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-24 16:38:252017-02-02 22:28:23Another four-bar linkage flower https://mechanicaldesign101.com/wp-content/uploads/2012/10/MechGen-Flower.jpg
418
857
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-24 16:31:442017-01-29 10:18:19A four-bar linkage flower
https://mechanicaldesign101.com/wp-content/uploads/2012/10/MechGen-Flower.jpg
418
857
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-24 16:31:442017-01-29 10:18:19A four-bar linkage flower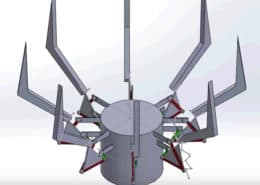 https://mechanicaldesign101.com/wp-content/uploads/2012/10/MechGen-Four-Bar-HW.jpg
414
776
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-18 19:33:512017-01-29 10:13:46Four-bar linkage design using Mech Gen
https://mechanicaldesign101.com/wp-content/uploads/2012/10/MechGen-Four-Bar-HW.jpg
414
776
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-18 19:33:512017-01-29 10:13:46Four-bar linkage design using Mech Gen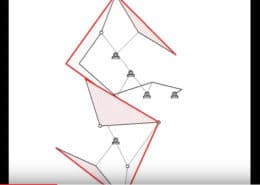 https://mechanicaldesign101.com/wp-content/uploads/2012/10/OSU-Mechanism.jpg
436
603
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-05 05:04:162017-01-29 10:07:59Shape-morphing linkages
https://mechanicaldesign101.com/wp-content/uploads/2012/10/OSU-Mechanism.jpg
436
603
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-10-05 05:04:162017-01-29 10:07:59Shape-morphing linkages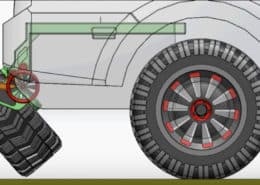 https://mechanicaldesign101.com/wp-content/uploads/2012/09/Spare-Tire-Linkage.jpg
522
1286
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-09-29 06:11:542017-02-03 13:11:02Spare Tire Deployment for a Pickup Truck
https://mechanicaldesign101.com/wp-content/uploads/2012/09/Spare-Tire-Linkage.jpg
522
1286
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-09-29 06:11:542017-02-03 13:11:02Spare Tire Deployment for a Pickup Truck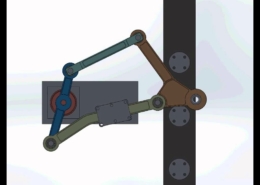 https://mechanicaldesign101.com/wp-content/uploads/2012/09/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-09-05 22:01:352022-09-17 09:25:56Bolt Insertion Six-bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/09/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-09-05 22:01:352022-09-17 09:25:56Bolt Insertion Six-bar Linkage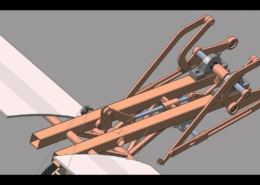 https://mechanicaldesign101.com/wp-content/uploads/2012/09/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-09-05 21:52:252022-09-17 09:25:56Rice Transplanter Six-bar
https://mechanicaldesign101.com/wp-content/uploads/2012/09/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-09-05 21:52:252022-09-17 09:25:56Rice Transplanter Six-bar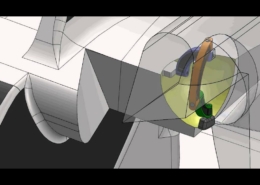 https://mechanicaldesign101.com/wp-content/uploads/2012/08/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-28 02:02:372022-09-17 09:25:56Icon A5 Wing Deployment Spherical Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/08/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-28 02:02:372022-09-17 09:25:56Icon A5 Wing Deployment Spherical Linkage https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-25 07:17:022022-09-17 09:25:56Spherical Four-bar Linkage Design: Mech Gen 4
https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-25 07:17:022022-09-17 09:25:56Spherical Four-bar Linkage Design: Mech Gen 4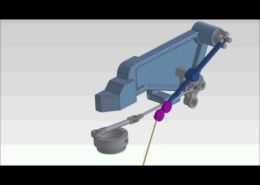 https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-24 05:02:372022-09-17 09:25:56Bobbin Linkage for a Rotating Weaver
https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-24 05:02:372022-09-17 09:25:56Bobbin Linkage for a Rotating Weaver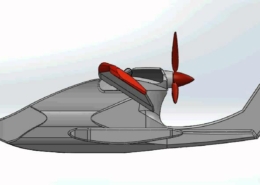 https://mechanicaldesign101.com/wp-content/uploads/2012/08/maxresdefault-1.jpg
424
1038
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-19 04:01:272022-09-17 09:25:56Icon A5 spherical four-bar wing linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/08/maxresdefault-1.jpg
424
1038
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-19 04:01:272022-09-17 09:25:56Icon A5 spherical four-bar wing linkage https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault-2.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-19 03:16:412022-09-17 09:25:56Six-bar gripper with fine adjustment
https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault-2.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-19 03:16:412022-09-17 09:25:56Six-bar gripper with fine adjustment https://mechanicaldesign101.com/wp-content/uploads/2012/08/21Century-Poster-small.jpg
1600
1067
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-02 15:13:042017-01-09 08:02:3421st Century Kinematics: Workshop Schedule
https://mechanicaldesign101.com/wp-content/uploads/2012/08/21Century-Poster-small.jpg
1600
1067
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-02 15:13:042017-01-09 08:02:3421st Century Kinematics: Workshop Schedule https://mechanicaldesign101.com/wp-content/uploads/2012/08/MCCARTHY_Cover_draft_low_res_01-copy.jpg
1167
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-02 15:03:312017-01-09 08:04:37Workshop on 21st Century Kinematics: The Book
https://mechanicaldesign101.com/wp-content/uploads/2012/08/MCCARTHY_Cover_draft_low_res_01-copy.jpg
1167
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-02 15:03:312017-01-09 08:04:37Workshop on 21st Century Kinematics: The Book https://mechanicaldesign101.com/wp-content/uploads/2012/07/Grant-Poster.jpg
1177
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-07-11 17:13:452017-01-09 08:10:48MechGen Poster for NSF
https://mechanicaldesign101.com/wp-content/uploads/2012/07/Grant-Poster.jpg
1177
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-07-11 17:13:452017-01-09 08:10:48MechGen Poster for NSF https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
0
0
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-06-30 04:31:232022-09-17 09:44:12Kinetic Art
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
0
0
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-06-30 04:31:232022-09-17 09:44:12Kinetic Art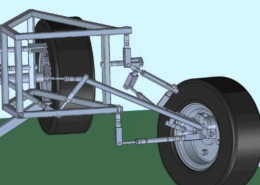 https://mechanicaldesign101.com/wp-content/uploads/2012/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-06-01 21:41:442022-09-17 09:25:565-SS Steering Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-06-01 21:41:442022-09-17 09:25:565-SS Steering Linkage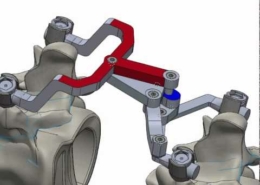 https://mechanicaldesign101.com/wp-content/uploads/2012/05/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-05-03 03:59:022022-09-17 09:25:56Adjustable spinal implant
https://mechanicaldesign101.com/wp-content/uploads/2012/05/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-05-03 03:59:022022-09-17 09:25:56Adjustable spinal implant https://mechanicaldesign101.com/wp-content/uploads/2012/05/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-05-03 03:44:162022-09-17 09:25:57Instrument for spinal implant
https://mechanicaldesign101.com/wp-content/uploads/2012/05/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-05-03 03:44:162022-09-17 09:25:57Instrument for spinal implant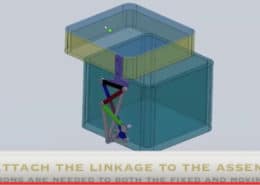 https://mechanicaldesign101.com/wp-content/uploads/2012/03/MechGen-3.jpg
544
1256
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-03-21 01:20:342017-01-24 17:50:04Mechanism Generator 3.0
https://mechanicaldesign101.com/wp-content/uploads/2012/03/MechGen-3.jpg
544
1256
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-03-21 01:20:342017-01-24 17:50:04Mechanism Generator 3.0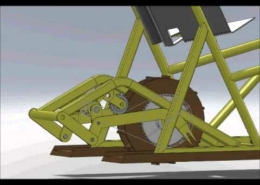 https://mechanicaldesign101.com/wp-content/uploads/2012/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-15 05:34:112022-09-17 09:26:13Rice Transplanter
https://mechanicaldesign101.com/wp-content/uploads/2012/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-15 05:34:112022-09-17 09:26:13Rice Transplanter https://mechanicaldesign101.com/wp-content/uploads/2012/01/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-14 23:34:192022-09-17 09:26:135SS Spatial Steering Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/01/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-14 23:34:192022-09-17 09:26:135SS Spatial Steering Linkage https://mechanicaldesign101.com/wp-content/uploads/2012/01/MechGen-2.jpg
413
815
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-06 07:46:042022-09-17 09:45:03Mechanism Generator 2.0 (MechGen 2)
https://mechanicaldesign101.com/wp-content/uploads/2012/01/MechGen-2.jpg
413
815
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-06 07:46:042022-09-17 09:45:03Mechanism Generator 2.0 (MechGen 2)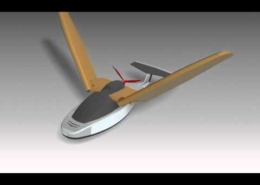 https://mechanicaldesign101.com/wp-content/uploads/2011/12/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-26 22:49:552022-09-17 09:26:13Folding movement for wings for the Icon A5
https://mechanicaldesign101.com/wp-content/uploads/2011/12/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-26 22:49:552022-09-17 09:26:13Folding movement for wings for the Icon A5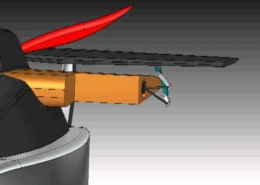 https://mechanicaldesign101.com/wp-content/uploads/2011/12/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-26 22:38:372022-09-17 09:26:13Spherical linkage concept to fold a wing
https://mechanicaldesign101.com/wp-content/uploads/2011/12/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-26 22:38:372022-09-17 09:26:13Spherical linkage concept to fold a wing https://mechanicaldesign101.com/wp-content/uploads/2011/12/hqdefault-2.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-26 22:27:152022-09-17 09:26:13Spare tire deployment linkage
https://mechanicaldesign101.com/wp-content/uploads/2011/12/hqdefault-2.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-26 22:27:152022-09-17 09:26:13Spare tire deployment linkage https://mechanicaldesign101.com/wp-content/uploads/2017/12/Screen-Shot-2017-12-05-at-7.34.57-AM.png
784
1224
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-07-08 04:07:302017-12-05 07:50:46Machines on Wikipedia
https://mechanicaldesign101.com/wp-content/uploads/2017/12/Screen-Shot-2017-12-05-at-7.34.57-AM.png
784
1224
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-07-08 04:07:302017-12-05 07:50:46Machines on Wikipedia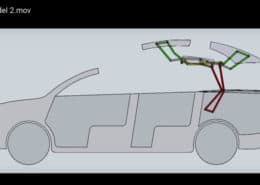 https://mechanicaldesign101.com/wp-content/uploads/2011/01/Hardtop-Convertible-New.jpg
429
833
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-01-29 21:02:502017-01-15 14:59:17Revised Three-panel Hardtop Convertible Linkage
https://mechanicaldesign101.com/wp-content/uploads/2011/01/Hardtop-Convertible-New.jpg
429
833
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-01-29 21:02:502017-01-15 14:59:17Revised Three-panel Hardtop Convertible Linkage https://mechanicaldesign101.com/wp-content/uploads/2010/12/Spherical-Fourbar.jpg
283
399
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-12-15 08:08:202017-01-07 22:35:50Spherical Four-Bar Linkages
https://mechanicaldesign101.com/wp-content/uploads/2010/12/Spherical-Fourbar.jpg
283
399
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-12-15 08:08:202017-01-07 22:35:50Spherical Four-Bar Linkages https://mechanicaldesign101.com/wp-content/uploads/2016/06/Geometric-design-book.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-12-06 23:57:202017-01-09 08:14:22Geometric Design of Linkages, second edition
https://mechanicaldesign101.com/wp-content/uploads/2016/06/Geometric-design-book.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-12-06 23:57:202017-01-09 08:14:22Geometric Design of Linkages, second edition https://mechanicaldesign101.com/wp-content/uploads/2010/11/Four-bar-Synthesis.jpg
646
902
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-25 09:00:322017-01-24 17:56:24Linkage Synthesis Demonstration
https://mechanicaldesign101.com/wp-content/uploads/2010/11/Four-bar-Synthesis.jpg
646
902
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-25 09:00:322017-01-24 17:56:24Linkage Synthesis Demonstration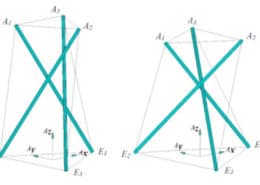 https://mechanicaldesign101.com/wp-content/uploads/2010/11/21st-Century-Kinematics.jpg
342
607
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-12 03:10:572017-01-07 22:40:4221st Century Kinematics
https://mechanicaldesign101.com/wp-content/uploads/2010/11/Kinematics-and-Computers.jpg
585
969
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-07 19:26:162017-01-07 22:48:49Kinematics, Polynomials and Computers–A Brief History
https://mechanicaldesign101.com/wp-content/uploads/2010/11/21st-Century-Kinematics.jpg
342
607
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-12 03:10:572017-01-07 22:40:4221st Century Kinematics
https://mechanicaldesign101.com/wp-content/uploads/2010/11/Kinematics-and-Computers.jpg
585
969
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-07 19:26:162017-01-07 22:48:49Kinematics, Polynomials and Computers–A Brief HistoryMicro-linkages for Compliant Material
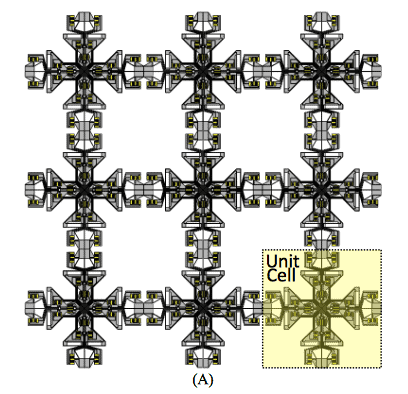
Material Unit Cell
Lucas Shaw and Prof. Jonathan Hopkins show the micro-architecture of an actively compliant material. Micro-actuators within the unit cells of an assembly are coordinated to reshape the assembly as desired. This was presented as part of the 2015 ASME Design Engineering Technical Conferences in Boston, MA, August 2-5. The video below shows what this assembly can do.
[youtube]https://www.youtube.com/watch?v=pPXMtlP_OAQ[/youtube]
Actuating Morphing Linkages
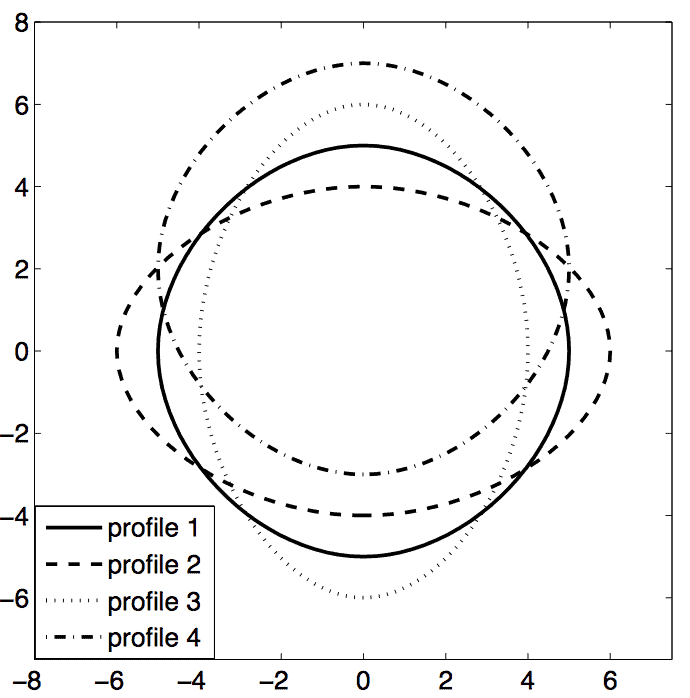
Target Profiles for Morphing Linkage
Lawrence Funke and Prof. James Schmiedeler of the University of Notre Dame Locomotion and Biomechanics Lab show that the movement of a morphing linkage through its target profiles can be improved by coordinating actuation of the sub-chains. This was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. The video below shows the improvement obtained by moving from 1 to 3 coordinated actuators.
[youtube]https://www.youtube.com/watch?v=r3DwHyRAh08[/youtube]
Rolling Robot at SUTD
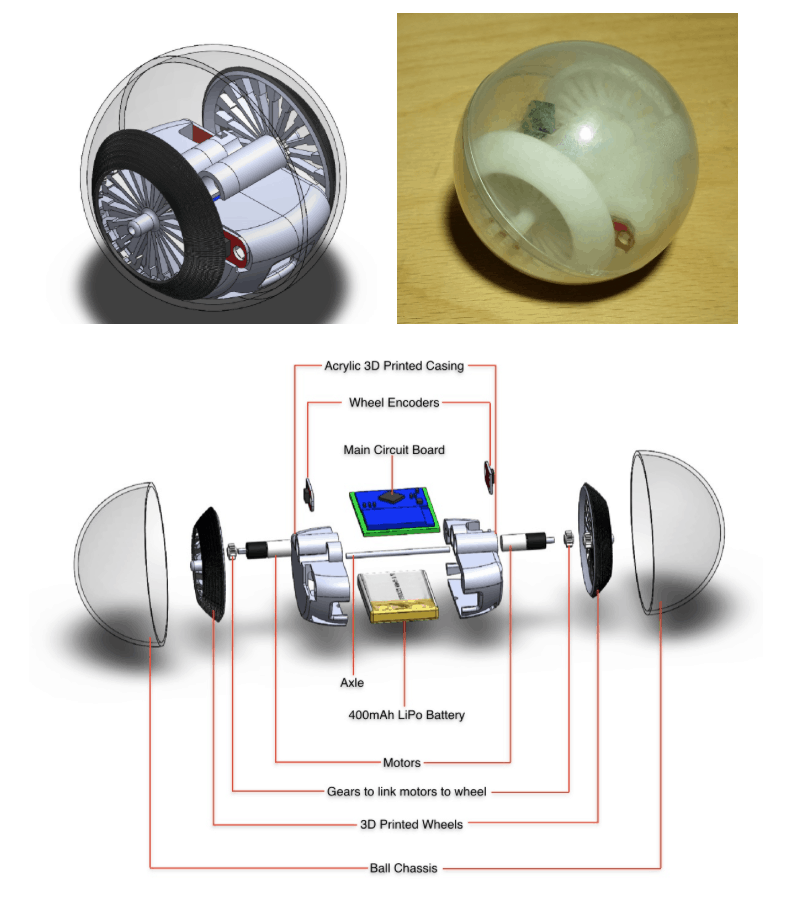
Virgo 2 SUTD
A research team including Profs. GimSong Soh, Kristin Wood and Kevin Otto at Robotics Innovation Lab at the Singapore University of Technology and Design has developed a rolling robot about the size of a baseball. The design and motion planning of this robot, Virgo 2.0, was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. A demonstration of the Virgo 2.0 moving through a figure eight path around obstacles is shown in the video below.
[youtube]https://www.youtube.com/watch?v=z9nZbOlhSqw[/youtube]
Interesting Planar Robot at Laval
[youtube]https://www.youtube.com/watch?v=_vp1ELEtDN4[/youtube]
Students of Prof. Clement Gosselin at the Laval University Robotics Laboratory demonstrate a four-degree of freedom planar robot. I particularly like the demonstration of its use as a gripper that does a cartwheel just for fun.
Tensegrity Robotics at UC Berkeley
[youtube]https://www.youtube.com/watch?v=ZwYXfijMet0[/youtube]
Students in Prof. Alice Agogino’s Berkeley Emergent Space Technologies Laboratory, the BEST Lab, working on motion planning for their tensegrity robot.
Origami Art at BYU

Origami Art BYU
Mechanical engineering students in Prof. Larry Howell’s Compliant Mechanisms Research Group designed and constructed this kinetic structure for the BYU Museum of Art. It illustrates paper folding known as origami.
[youtube]https://www.youtube.com/watch?v=5e28J066oGY[/youtube]