
Robotics
 https://mechanicaldesign101.com/wp-content/uploads/2015/11/HeartLinkage.jpg
898
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-11-13 23:33:082017-04-14 13:56:24Heart Trajectory
https://mechanicaldesign101.com/wp-content/uploads/2015/11/HeartLinkage.jpg
898
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-11-13 23:33:082017-04-14 13:56:24Heart Trajectory https://mechanicaldesign101.com/wp-content/uploads/2015/08/Folding-Bicycle.png
367
649
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-14 16:57:512017-04-14 13:56:47Full Size Folding Bicycle
https://mechanicaldesign101.com/wp-content/uploads/2015/08/Folding-Bicycle.png
367
649
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-14 16:57:512017-04-14 13:56:47Full Size Folding Bicycle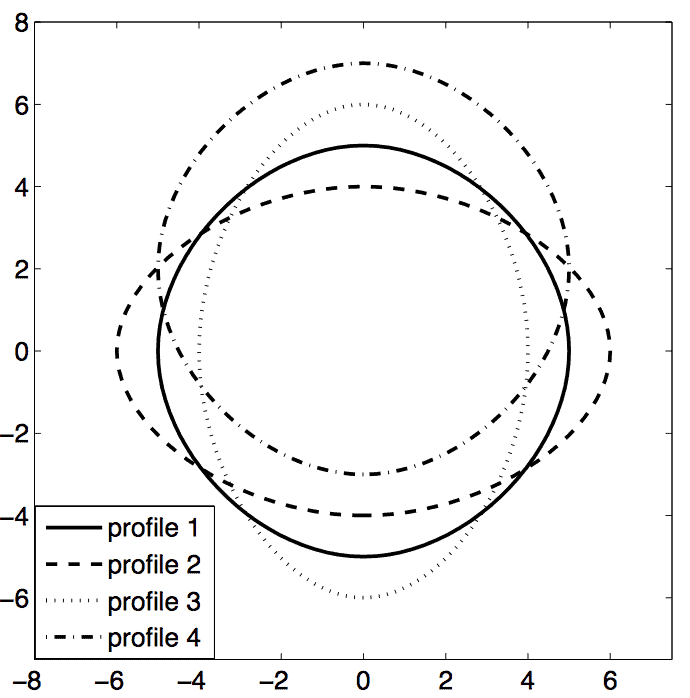 https://mechanicaldesign101.com/wp-content/uploads/2015/08/Target-Profiles-for-Morphing-Linkage.png
698
690
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 08:11:562017-04-14 14:00:12Actuating Morphing Linkages
https://mechanicaldesign101.com/wp-content/uploads/2015/08/Target-Profiles-for-Morphing-Linkage.png
698
690
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 08:11:562017-04-14 14:00:12Actuating Morphing Linkages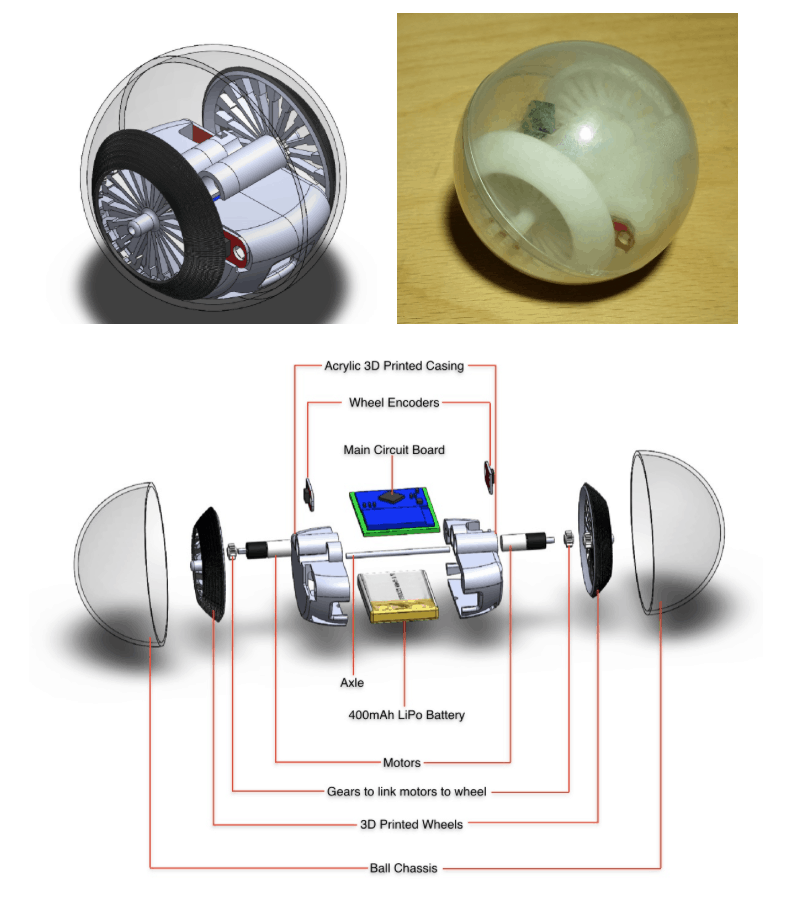 https://mechanicaldesign101.com/wp-content/uploads/2015/08/Virgo-2-SUTD.png
906
810
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 07:13:422022-09-17 09:28:25Rolling Robot at SUTD
https://mechanicaldesign101.com/wp-content/uploads/2015/08/Virgo-2-SUTD.png
906
810
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 07:13:422022-09-17 09:28:25Rolling Robot at SUTD https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-10 08:50:262022-09-17 09:25:55An Interesting Planar Robot at Laval
https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-10 08:50:262022-09-17 09:25:55An Interesting Planar Robot at Laval https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-09 09:35:292022-09-17 09:25:55Tensegrity Robotics at UC Berkeley
https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-09 09:35:292022-09-17 09:25:55Tensegrity Robotics at UC Berkeley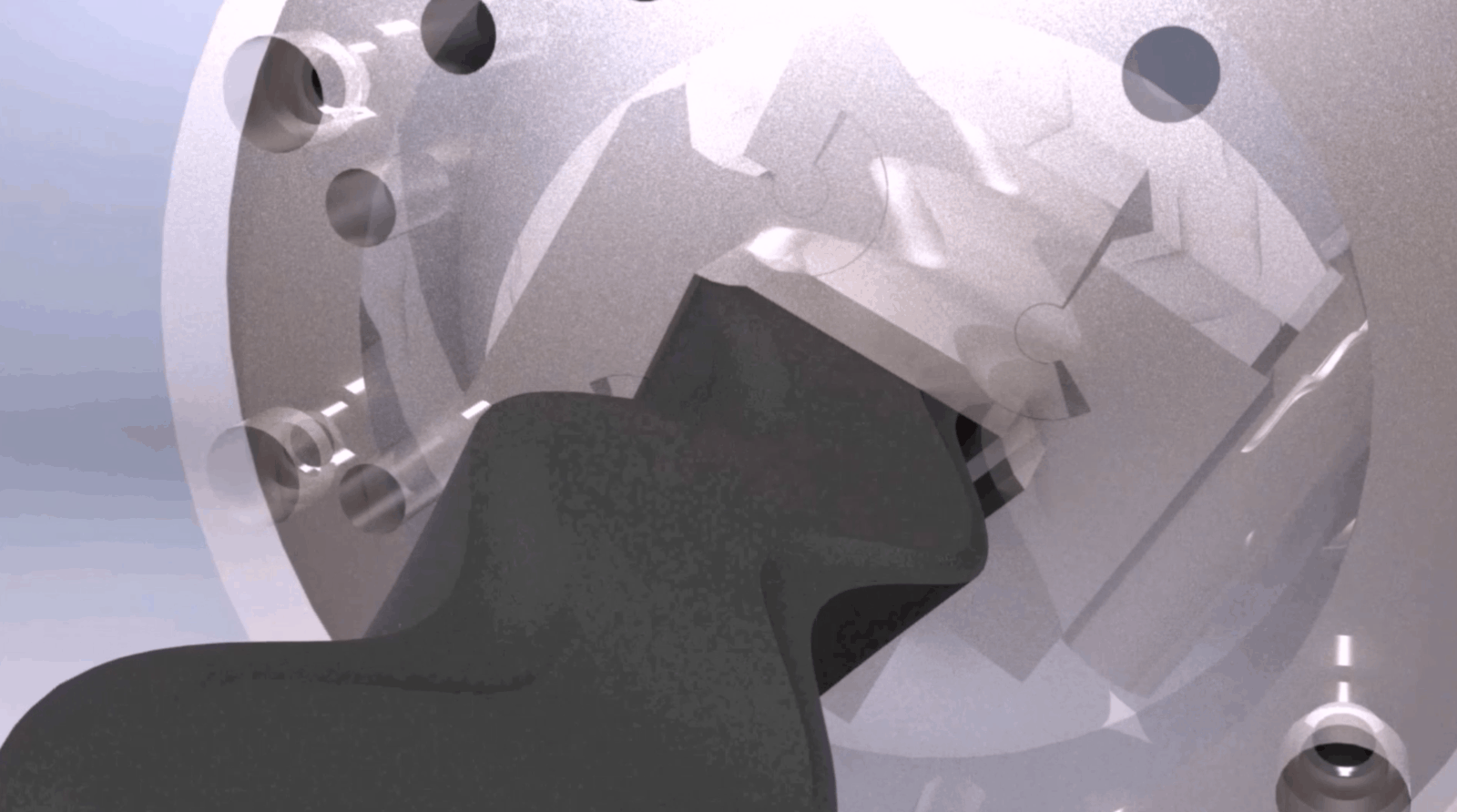 https://mechanicaldesign101.com/wp-content/uploads/2015/07/Fourbar-extrusion.png
892
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-30 16:30:382022-09-17 09:29:49A four-bar linkage provides a shape changing extrusion die
https://mechanicaldesign101.com/wp-content/uploads/2015/07/Fourbar-extrusion.png
892
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-30 16:30:382022-09-17 09:29:49A four-bar linkage provides a shape changing extrusion die https://mechanicaldesign101.com/wp-content/uploads/2015/05/IMG_0993.jpg
640
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-04 19:04:242017-04-14 14:15:18Patches for the Energy Invitational and Rescue Robotics Challenge
https://mechanicaldesign101.com/wp-content/uploads/2015/05/IMG_0993.jpg
640
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-04 19:04:242017-04-14 14:15:18Patches for the Energy Invitational and Rescue Robotics Challenge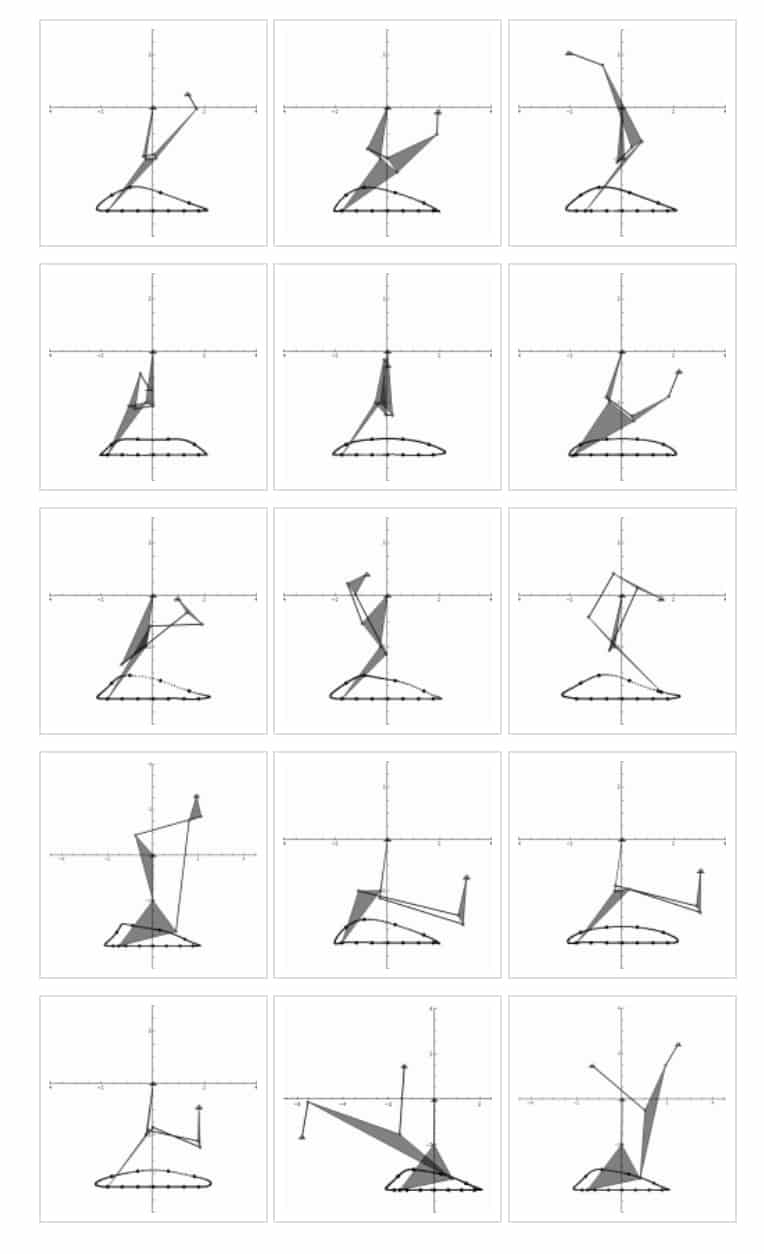 https://mechanicaldesign101.com/wp-content/uploads/2015/05/LegMechanisms.jpg
1254
764
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-01 08:34:182022-09-17 09:33:57Walking Machines
https://mechanicaldesign101.com/wp-content/uploads/2015/05/LegMechanisms.jpg
1254
764
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-01 08:34:182022-09-17 09:33:57Walking Machines https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-12 20:02:092022-09-17 09:25:55Another version of the six-bar folding linkage
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-12 20:02:092022-09-17 09:25:55Another version of the six-bar folding linkage https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-12 10:01:052022-09-17 09:25:55Six-bar linkage folds a structure
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-12 10:01:052022-09-17 09:25:55Six-bar linkage folds a structure https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-08 15:47:212022-09-17 09:25:55Eight-bar Port Closure Tool
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-08 15:47:212022-09-17 09:25:55Eight-bar Port Closure Tool https://mechanicaldesign101.com/wp-content/uploads/2015/01/Four-bar-function-generator.jpg
762
1012
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-01-18 09:46:012019-03-25 21:19:26Four-bar function generator: Open a door
https://mechanicaldesign101.com/wp-content/uploads/2015/01/Four-bar-function-generator.jpg
762
1012
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-01-18 09:46:012019-03-25 21:19:26Four-bar function generator: Open a door https://mechanicaldesign101.com/wp-content/uploads/2014/12/GeogebraBook.jpg
838
1082
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-12-02 16:35:092019-03-25 21:22:08Introduction to Linkages
https://mechanicaldesign101.com/wp-content/uploads/2014/12/GeogebraBook.jpg
838
1082
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-12-02 16:35:092019-03-25 21:22:08Introduction to Linkages https://mechanicaldesign101.com/wp-content/uploads/2014/11/Athlete-Rover-Nasa.jpg
232
376
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-11-23 20:09:592022-07-08 19:33:21JPL’s ATHLETE Rover Walks, Rolls, and Slides
https://mechanicaldesign101.com/wp-content/uploads/2014/11/Athlete-Rover-Nasa.jpg
232
376
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-11-23 20:09:592022-07-08 19:33:21JPL’s ATHLETE Rover Walks, Rolls, and Slides https://mechanicaldesign101.com/wp-content/uploads/2014/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-11-14 09:42:512022-09-17 09:25:56Linkage Design for Wing Flapping
https://mechanicaldesign101.com/wp-content/uploads/2014/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-11-14 09:42:512022-09-17 09:25:56Linkage Design for Wing Flapping https://mechanicaldesign101.com/wp-content/uploads/2014/11/DisneyPrototyping.jpg
388
450
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-11-14 09:27:142019-03-26 20:38:16Linkage Synthesis at Disney Research Zurich
https://mechanicaldesign101.com/wp-content/uploads/2014/11/DisneyPrototyping.jpg
388
450
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-11-14 09:27:142019-03-26 20:38:16Linkage Synthesis at Disney Research Zurich https://mechanicaldesign101.com/wp-content/uploads/2014/09/Screen-shot-2014-09-09-at-4.10.31-PM.jpg
476
709
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-09-11 18:32:262022-09-17 09:43:023D Printed Demining Training Aids
https://mechanicaldesign101.com/wp-content/uploads/2014/09/Screen-shot-2014-09-09-at-4.10.31-PM.jpg
476
709
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-09-11 18:32:262022-09-17 09:43:023D Printed Demining Training Aids https://mechanicaldesign101.com/wp-content/uploads/2014/09/springactive-spark.jpg
209
218
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-09-04 21:45:292017-04-14 14:33:07Wearable Robotics Put Spring in Your Step
https://mechanicaldesign101.com/wp-content/uploads/2014/09/springactive-spark.jpg
209
218
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-09-04 21:45:292017-04-14 14:33:07Wearable Robotics Put Spring in Your Step https://mechanicaldesign101.com/wp-content/uploads/2014/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-06-03 20:17:092022-09-17 09:25:56Eight-bar motion amplifier
https://mechanicaldesign101.com/wp-content/uploads/2014/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-06-03 20:17:092022-09-17 09:25:56Eight-bar motion amplifier https://mechanicaldesign101.com/wp-content/uploads/2014/04/Rectilinear-Suspension.jpg
291
496
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-04-17 03:17:112017-04-14 14:36:21Rectilinear eight-bar suspension
https://mechanicaldesign101.com/wp-content/uploads/2014/04/Rectilinear-Suspension.jpg
291
496
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-04-17 03:17:112017-04-14 14:36:21Rectilinear eight-bar suspension https://mechanicaldesign101.com/wp-content/uploads/2014/04/Rectilinear-Eight-bar.jpg
299
494
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-04-09 19:57:262017-04-14 14:36:44Rectilinear eight-bar linkage
https://mechanicaldesign101.com/wp-content/uploads/2014/04/Rectilinear-Eight-bar.jpg
299
494
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-04-09 19:57:262017-04-14 14:36:44Rectilinear eight-bar linkage https://mechanicaldesign101.com/wp-content/uploads/2014/01/Rectilinear-Link.jpg
358
647
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-01-20 23:15:042017-04-14 14:37:08Six-bar linkage with rectilinear moving link
https://mechanicaldesign101.com/wp-content/uploads/2014/01/Rectilinear-Link.jpg
358
647
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-01-20 23:15:042017-04-14 14:37:08Six-bar linkage with rectilinear moving link https://mechanicaldesign101.com/wp-content/uploads/2013/10/Kinematics-and-Polynomials.jpg
662
1299
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-10-23 18:11:302017-04-14 14:40:45Kinematics and Polynomials–available on a Mac
https://mechanicaldesign101.com/wp-content/uploads/2013/10/Kinematics-and-Polynomials.jpg
662
1299
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-10-23 18:11:302017-04-14 14:40:45Kinematics and Polynomials–available on a Mac https://mechanicaldesign101.com/wp-content/uploads/2013/08/Mechanical-Characters.jpg
603
1215
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-08-10 15:21:252019-03-26 20:45:15Mechanical characters
https://mechanicaldesign101.com/wp-content/uploads/2013/08/Mechanical-Characters.jpg
603
1215
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-08-10 15:21:252019-03-26 20:45:15Mechanical characters https://mechanicaldesign101.com/wp-content/uploads/2013/08/Six-bar-linkages.jpg
442
1284
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-08-01 03:33:132017-01-05 21:15:08Six-bar Linkage Design for Mechanical Computation
https://mechanicaldesign101.com/wp-content/uploads/2013/08/Six-bar-linkages.jpg
442
1284
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-08-01 03:33:132017-01-05 21:15:08Six-bar Linkage Design for Mechanical Computation https://mechanicaldesign101.com/wp-content/uploads/2013/06/Ballistic-Function.jpg
236
485
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-06-11 06:23:152017-01-23 14:09:48Mechanization of the ballistic function
https://mechanicaldesign101.com/wp-content/uploads/2013/06/Ballistic-Function.jpg
236
485
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-06-11 06:23:152017-01-23 14:09:48Mechanization of the ballistic function https://mechanicaldesign101.com/wp-content/uploads/2013/05/Waldron-Celebration.jpg
479
908
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-18 22:24:302017-01-05 21:12:32Waldron Fest: May 16-17, 2013
https://mechanicaldesign101.com/wp-content/uploads/2013/05/Waldron-Celebration.jpg
479
908
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-18 22:24:302017-01-05 21:12:32Waldron Fest: May 16-17, 2013 https://mechanicaldesign101.com/wp-content/uploads/2013/05/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-07 03:10:542022-09-17 09:25:56Retractable handle
https://mechanicaldesign101.com/wp-content/uploads/2013/05/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-07 03:10:542022-09-17 09:25:56Retractable handle https://mechanicaldesign101.com/wp-content/uploads/2013/05/Tensegrity-Linkage.jpg
296
584
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-03 15:10:362017-01-23 14:18:18Tensegrity Linkage
https://mechanicaldesign101.com/wp-content/uploads/2013/05/Tensegrity-Linkage.jpg
296
584
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-03 15:10:362017-01-23 14:18:18Tensegrity Linkage https://mechanicaldesign101.com/wp-content/uploads/2013/03/Cover-ITTK.jpg
1187
911
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-03-29 00:16:382017-01-09 07:54:16Introduction to Theoretical Kinematics
https://mechanicaldesign101.com/wp-content/uploads/2013/03/Cover-ITTK.jpg
1187
911
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-03-29 00:16:382017-01-09 07:54:16Introduction to Theoretical Kinematics https://mechanicaldesign101.com/wp-content/uploads/2013/03/Kempe-Linkages.jpg
444
1086
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-03-22 11:44:392017-01-26 08:39:51Translational Linkages from Kempe
https://mechanicaldesign101.com/wp-content/uploads/2013/03/Kempe-Linkages.jpg
444
1086
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-03-22 11:44:392017-01-26 08:39:51Translational Linkages from Kempe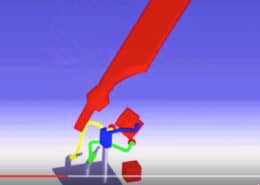 https://mechanicaldesign101.com/wp-content/uploads/2013/03/Kassim-Car-Door.jpg
526
1208
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-03-22 03:51:322017-01-26 08:44:39An RSSR-TS Car Door Linkage
https://mechanicaldesign101.com/wp-content/uploads/2013/03/Kassim-Car-Door.jpg
526
1208
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-03-22 03:51:322017-01-26 08:44:39An RSSR-TS Car Door Linkage https://mechanicaldesign101.com/wp-content/uploads/2013/01/Spherical-Car-Door-Linkage.jpg
590
1332
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-27 20:18:072017-01-26 09:00:06Spherical Watt I six-bar up close
https://mechanicaldesign101.com/wp-content/uploads/2013/01/Spherical-Car-Door-Linkage.jpg
590
1332
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-27 20:18:072017-01-26 09:00:06Spherical Watt I six-bar up close https://mechanicaldesign101.com/wp-content/uploads/2013/01/Spherical-Car-Door.jpg
540
1308
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-26 17:50:252017-01-26 09:03:43Spherical Watt I six-bar linkage
https://mechanicaldesign101.com/wp-content/uploads/2013/01/Spherical-Car-Door.jpg
540
1308
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-26 17:50:252017-01-26 09:03:43Spherical Watt I six-bar linkage https://mechanicaldesign101.com/wp-content/uploads/2013/01/Six-bar-Function-Generator.jpg
610
1060
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-26 17:42:062017-01-26 09:07:54Stephenson II six-bar linkage function generator
https://mechanicaldesign101.com/wp-content/uploads/2013/01/Six-bar-Function-Generator.jpg
610
1060
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-26 17:42:062017-01-26 09:07:54Stephenson II six-bar linkage function generator https://mechanicaldesign101.com/wp-content/uploads/2013/01/Plecnik-Art.jpg
446
1234
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-08 05:20:082017-01-26 09:12:33Mark Plecnik’s Art Project
https://mechanicaldesign101.com/wp-content/uploads/2013/01/Plecnik-Art.jpg
446
1234
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-01-08 05:20:082017-01-26 09:12:33Mark Plecnik’s Art Project https://mechanicaldesign101.com/wp-content/uploads/2012/12/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 04:11:382022-09-17 09:25:56Cameron Turner’s Wheelbarrow Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/12/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 04:11:382022-09-17 09:25:56Cameron Turner’s Wheelbarrow Linkage https://mechanicaldesign101.com/wp-content/uploads/2012/12/Aeleron-Linkage.jpg
333
759
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 03:12:292017-01-29 12:57:59Colin Sledge’s Aileron Linkage
https://mechanicaldesign101.com/wp-content/uploads/2012/12/Aeleron-Linkage.jpg
333
759
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 03:12:292017-01-29 12:57:59Colin Sledge’s Aileron LinkageMicro-linkages for Compliant Material
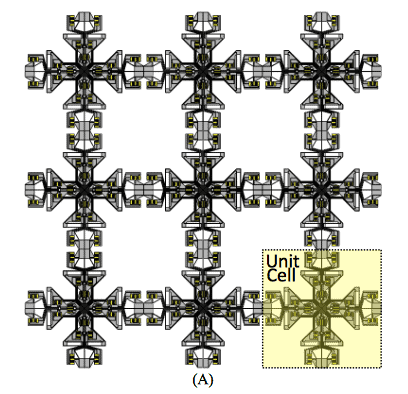
Material Unit Cell
Lucas Shaw and Prof. Jonathan Hopkins show the micro-architecture of an actively compliant material. Micro-actuators within the unit cells of an assembly are coordinated to reshape the assembly as desired. This was presented as part of the 2015 ASME Design Engineering Technical Conferences in Boston, MA, August 2-5. The video below shows what this assembly can do.
[youtube]https://www.youtube.com/watch?v=pPXMtlP_OAQ[/youtube]
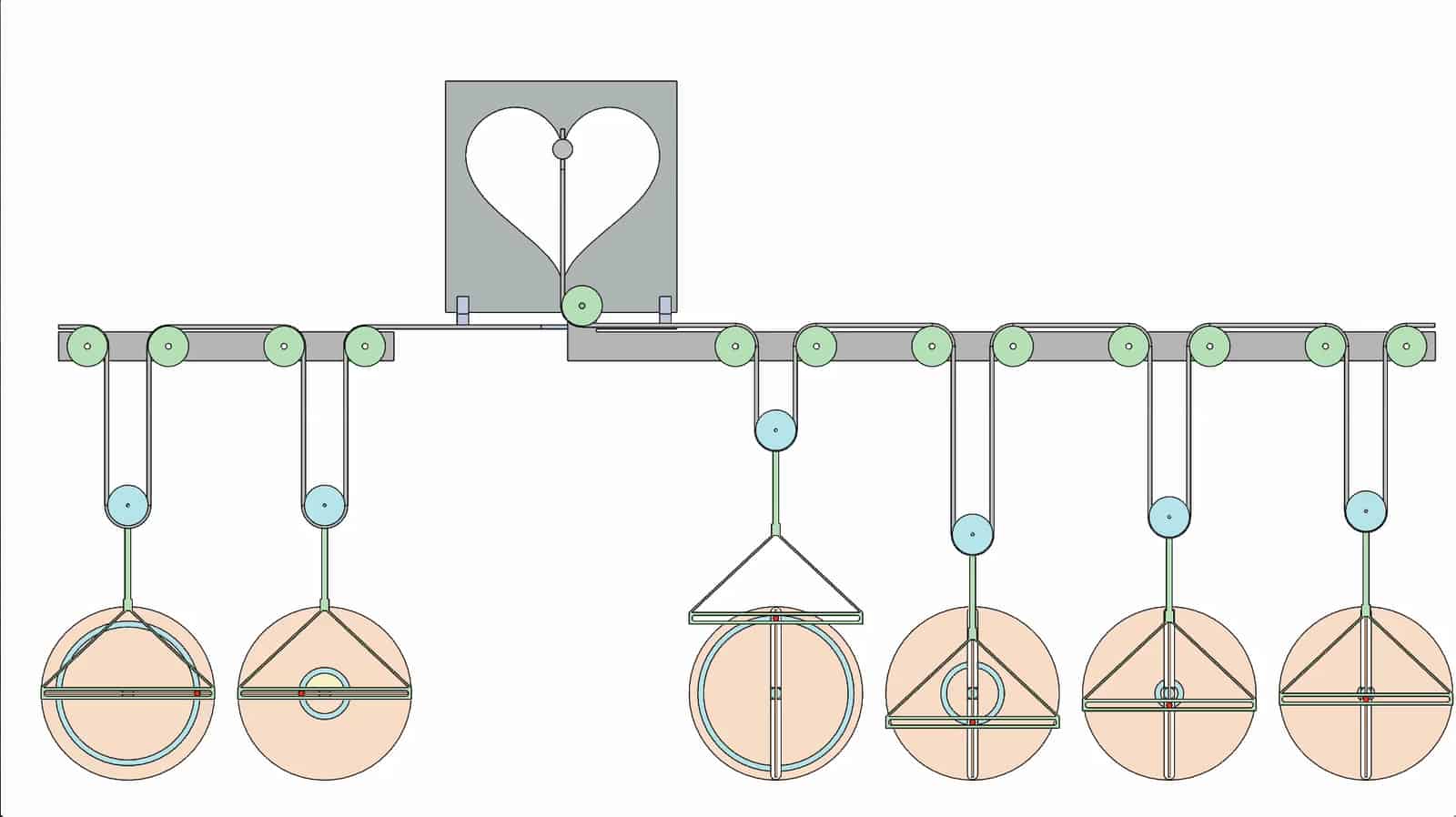
Actuating Morphing Linkages
Target Profiles for Morphing Linkage
Lawrence Funke and Prof. James Schmiedeler of the University of Notre Dame Locomotion and Biomechanics Lab show that the movement of a morphing linkage through its target profiles can be improved by coordinating actuation of the sub-chains. This was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. The video below shows the improvement obtained by moving from 1 to 3 coordinated actuators.
[youtube]https://www.youtube.com/watch?v=r3DwHyRAh08[/youtube]
Rolling Robot at SUTD
Virgo 2 SUTD
A research team including Profs. GimSong Soh, Kristin Wood and Kevin Otto at Robotics Innovation Lab at the Singapore University of Technology and Design has developed a rolling robot about the size of a baseball. The design and motion planning of this robot, Virgo 2.0, was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. A demonstration of the Virgo 2.0 moving through a figure eight path around obstacles is shown in the video below.
[youtube]https://www.youtube.com/watch?v=z9nZbOlhSqw[/youtube]
Interesting Planar Robot at Laval
[youtube]https://www.youtube.com/watch?v=_vp1ELEtDN4[/youtube]
Students of Prof. Clement Gosselin at the Laval University Robotics Laboratory demonstrate a four-degree of freedom planar robot. I particularly like the demonstration of its use as a gripper that does a cartwheel just for fun.
Tensegrity Robotics at UC Berkeley
[youtube]https://www.youtube.com/watch?v=ZwYXfijMet0[/youtube]
Students in Prof. Alice Agogino’s Berkeley Emergent Space Technologies Laboratory, the BEST Lab, working on motion planning for their tensegrity robot.
Origami Art at BYU

Origami Art BYU
Mechanical engineering students in Prof. Larry Howell’s Compliant Mechanisms Research Group designed and constructed this kinetic structure for the BYU Museum of Art. It illustrates paper folding known as origami.
[youtube]https://www.youtube.com/watch?v=5e28J066oGY[/youtube]