
Robotics
 https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-12 11:54:002022-09-17 09:25:54Five Position Synthesis of Four-bar Function Generators
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-12 11:54:002022-09-17 09:25:54Five Position Synthesis of Four-bar Function Generators https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-11 13:03:012022-09-17 09:25:54Construction for Two-Position Synthesis of a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-11 13:03:012022-09-17 09:25:54Construction for Two-Position Synthesis of a Four-Bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 17:12:212022-09-17 09:25:54Construction of a Skew Pantograph Leg Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 17:12:212022-09-17 09:25:54Construction of a Skew Pantograph Leg Mechanism https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 15:41:012022-09-17 09:25:54Construction of Klann-style Leg Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 15:41:012022-09-17 09:25:54Construction of Klann-style Leg Mechanism https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-26 13:51:452022-09-17 09:25:54Construction of a Translating Link for a Leg Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-26 13:51:452022-09-17 09:25:54Construction of a Translating Link for a Leg Mechanism https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-23 10:38:022022-09-17 09:25:55Construction of the Cubic of Stationary Curvature for a Four-bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-23 10:38:022022-09-17 09:25:55Construction of the Cubic of Stationary Curvature for a Four-bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 22:12:412022-09-17 09:25:55Construction of the Inflection Circle for a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 22:12:412022-09-17 09:25:55Construction of the Inflection Circle for a Four-Bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-5.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 17:13:402022-09-17 09:25:55Construction of the Canonical Coordinate System for a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-5.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 17:13:402022-09-17 09:25:55Construction of the Canonical Coordinate System for a Four-Bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-16-at-2.20.21-PM.jpg
740
1304
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-16 14:22:582019-05-25 12:08:24Walking Machine Class Projects: Ohio State ME 5751
https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-16-at-2.20.21-PM.jpg
740
1304
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-16 14:22:582019-05-25 12:08:24Walking Machine Class Projects: Ohio State ME 5751 https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-14 08:31:382022-09-17 09:25:55Sphinx and Sphere VR and the History of Kinematic Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-14 08:31:382022-09-17 09:25:55Sphinx and Sphere VR and the History of Kinematic Synthesis https://mechanicaldesign101.com/wp-content/uploads/2019/04/guide_map.jpg
768
1024
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-13 09:42:492019-05-26 12:17:56LINCAGES and the History of Kinematic Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2019/04/guide_map.jpg
768
1024
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-13 09:42:492019-05-26 12:17:56LINCAGES and the History of Kinematic Synthesis https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-12 16:58:422022-09-17 09:25:55KinSyn and the History of Kinematic Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-12 16:58:422022-09-17 09:25:55KinSyn and the History of Kinematic Synthesis https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-10-at-10.55.22-AM.png
422
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-10 11:03:032019-05-25 12:13:41Strider and TrotBot at DIYWalkers.com
https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-10-at-10.55.22-AM.png
422
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-10 11:03:032019-05-25 12:13:41Strider and TrotBot at DIYWalkers.com JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Figure-8.1.png
1115
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:28:202019-05-25 12:14:49About Geogebra-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Figure-8.1.png
1115
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:28:202019-05-25 12:14:49About Geogebra-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-6-Title.jpg
943
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:20:142019-05-25 12:16:13Chapter 6 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-6-Title.jpg
943
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:20:142019-05-25 12:16:13Chapter 6 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-5-Title.jpg
1007
1333
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 20:23:422019-05-25 12:17:24Chapter 5 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-5-Title.jpg
1007
1333
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 20:23:422019-05-25 12:17:24Chapter 5 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-4-Title.png
983
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 16:08:542019-05-25 12:18:33Chapter 4 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-4-Title.png
983
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 16:08:542019-05-25 12:18:33Chapter 4 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-3-Title.png
959
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 07:28:242019-05-25 12:19:38Chapter 3 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-3-Title.png
959
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 07:28:242019-05-25 12:19:38Chapter 3 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-2-Title.png
1155
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-26 20:22:072019-05-25 12:21:32Chapter 2 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-2-Title.png
1155
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-26 20:22:072019-05-25 12:21:32Chapter 2 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-1-Title.jpg
666
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-26 15:45:072019-05-25 12:22:41Chapter 1 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-1-Title.jpg
666
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-26 15:45:072019-05-25 12:22:41Chapter 1 Animations-Kinematic Synthesis of Mechanisms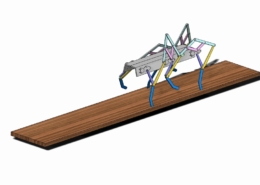 https://mechanicaldesign101.com/wp-content/uploads/2019/03/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-26 15:18:452022-09-17 09:25:55Kinematic Synthesis of Mechanisms Title Video
https://mechanicaldesign101.com/wp-content/uploads/2019/03/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-26 15:18:452022-09-17 09:25:55Kinematic Synthesis of Mechanisms Title Video JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Screen-Shot-2019-03-25-at-1.36.33-PM.jpg
829
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-25 13:43:562019-05-25 12:24:32Kinematic Synthesis of Mechanisms: A project based approach
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Screen-Shot-2019-03-25-at-1.36.33-PM.jpg
829
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-25 13:43:562019-05-25 12:24:32Kinematic Synthesis of Mechanisms: A project based approach https://mechanicaldesign101.com/wp-content/uploads/2018/07/Amazon-ITTK.jpg
800
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2018-07-20 13:36:232018-07-20 13:39:16Introduction to Theoretical Kinematics, paperback on Amazon.com
https://mechanicaldesign101.com/wp-content/uploads/2018/07/Amazon-ITTK.jpg
800
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2018-07-20 13:36:232018-07-20 13:39:16Introduction to Theoretical Kinematics, paperback on Amazon.com GraspLab Seminar
https://mechanicaldesign101.com/wp-content/uploads/2018/07/GraspLab-Seminar-3.jpg
460
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2018-07-20 10:14:502018-07-20 10:41:20Design of Linkages to Draw Curves, GRASPLab Seminar
GraspLab Seminar
https://mechanicaldesign101.com/wp-content/uploads/2018/07/GraspLab-Seminar-3.jpg
460
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2018-07-20 10:14:502018-07-20 10:41:20Design of Linkages to Draw Curves, GRASPLab Seminar https://mechanicaldesign101.com/wp-content/uploads/2018/01/Screen-Shot-2018-01-14-at-2.43.53-PM.jpg
777
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2018-01-14 14:43:132018-01-14 14:50:46Rectilinear Six-Bar (Candy Coating Linkage)
https://mechanicaldesign101.com/wp-content/uploads/2018/01/Screen-Shot-2018-01-14-at-2.43.53-PM.jpg
777
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2018-01-14 14:43:132018-01-14 14:50:46Rectilinear Six-Bar (Candy Coating Linkage)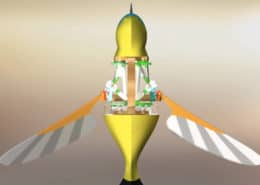 https://mechanicaldesign101.com/wp-content/uploads/2017/10/Hummingbird-Six-bar.jpg
935
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-10-13 11:00:482017-10-13 11:09:06Hummingbird Spatial Six-bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2017/10/Hummingbird-Six-bar.jpg
935
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-10-13 11:00:482017-10-13 11:09:06Hummingbird Spatial Six-bar Linkage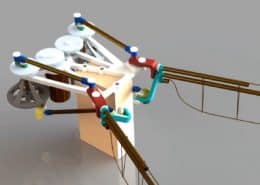 https://mechanicaldesign101.com/wp-content/uploads/2017/08/Flapping-Wing-Prototype.jpg
829
1598
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-08-16 10:39:472017-08-18 21:31:59Flapping Wing Prototype
https://mechanicaldesign101.com/wp-content/uploads/2017/08/Flapping-Wing-Prototype.jpg
829
1598
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-08-16 10:39:472017-08-18 21:31:59Flapping Wing Prototype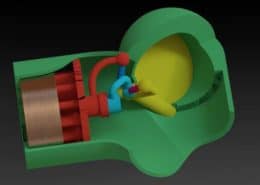 https://mechanicaldesign101.com/wp-content/uploads/2017/08/Conditioning-Port-Valve.jpg
613
1061
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-08-13 22:14:472017-08-18 21:32:50RPR-2SS Soil Conditioning Valve
https://mechanicaldesign101.com/wp-content/uploads/2017/08/Conditioning-Port-Valve.jpg
613
1061
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-08-13 22:14:472017-08-18 21:32:50RPR-2SS Soil Conditioning Valve https://mechanicaldesign101.com/wp-content/uploads/2017/05/Hummingbird-Linkage.jpg
922
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-05-05 16:09:252017-05-05 16:39:57Flapping Wing Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2017/05/Hummingbird-Linkage.jpg
922
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-05-05 16:09:252017-05-05 16:39:57Flapping Wing Mechanism https://mechanicaldesign101.com/wp-content/uploads/2017/03/Cursive-Dragon.jpg
787
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-03-30 15:44:042017-04-14 13:40:17Linkages draw Bezier curves
https://mechanicaldesign101.com/wp-content/uploads/2017/03/Cursive-Dragon.jpg
787
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-03-30 15:44:042017-04-14 13:40:17Linkages draw Bezier curves https://mechanicaldesign101.com/wp-content/uploads/2017/03/Yang-Signature.jpg
716
1257
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-03-08 11:52:312017-04-14 13:43:16Linkage that signs your name
https://mechanicaldesign101.com/wp-content/uploads/2017/03/Yang-Signature.jpg
716
1257
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-03-08 11:52:312017-04-14 13:43:16Linkage that signs your name https://mechanicaldesign101.com/wp-content/uploads/2016/11/Prototype-Butterfly-Linkage.jpg
720
1278
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-11-23 21:55:572017-04-14 13:47:53Manufacturing Prototype for the Butterfly Linkage
https://mechanicaldesign101.com/wp-content/uploads/2016/11/Prototype-Butterfly-Linkage.jpg
720
1278
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-11-23 21:55:572017-04-14 13:47:53Manufacturing Prototype for the Butterfly Linkage https://mechanicaldesign101.com/wp-content/uploads/2016/11/Whale-Linkage-1.jpg
962
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-11-23 07:54:152017-04-14 13:48:28Bezier Linkages
https://mechanicaldesign101.com/wp-content/uploads/2016/11/Whale-Linkage-1.jpg
962
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-11-23 07:54:152017-04-14 13:48:28Bezier Linkages https://mechanicaldesign101.com/wp-content/uploads/2016/11/RoboticsHandbook.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-11-05 22:59:582017-04-14 13:49:37Robot Ethics
https://mechanicaldesign101.com/wp-content/uploads/2016/11/RoboticsHandbook.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-11-05 22:59:582017-04-14 13:49:37Robot Ethics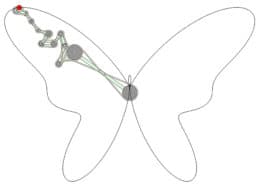 https://mechanicaldesign101.com/wp-content/uploads/2016/10/ButterflyMech2.jpg
635
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-10-20 18:06:162022-07-08 19:36:01Design of Drawing Mechanisms
https://mechanicaldesign101.com/wp-content/uploads/2016/10/ButterflyMech2.jpg
635
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-10-20 18:06:162022-07-08 19:36:01Design of Drawing Mechanisms https://mechanicaldesign101.com/wp-content/uploads/2016/08/Mech-Conference.jpg
544
800
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-08-13 09:55:452022-07-08 19:34:582016 Mechanisms and Robotics Conference
https://mechanicaldesign101.com/wp-content/uploads/2016/08/Mech-Conference.jpg
544
800
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-08-13 09:55:452022-07-08 19:34:582016 Mechanisms and Robotics Conference https://mechanicaldesign101.com/wp-content/uploads/2016/08/MotionGen-Horse.jpg
481
800
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-08-08 13:54:302017-04-14 13:50:57Motion Gen Linkage Design App
https://mechanicaldesign101.com/wp-content/uploads/2016/08/MotionGen-Horse.jpg
481
800
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-08-08 13:54:302017-04-14 13:50:57Motion Gen Linkage Design App https://mechanicaldesign101.com/wp-content/uploads/2016/07/TrifoliumContra.jpg
895
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-07-31 11:11:472017-04-14 13:51:30Trifolium using contra-parallelograms
https://mechanicaldesign101.com/wp-content/uploads/2016/07/TrifoliumContra.jpg
895
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-07-31 11:11:472017-04-14 13:51:30Trifolium using contra-parallelograms https://mechanicaldesign101.com/wp-content/uploads/2015/12/Fourier-Curve-Tracing.jpg
901
947
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-12-24 11:28:162017-04-14 13:53:12Fourier Curve Tracing
https://mechanicaldesign101.com/wp-content/uploads/2015/12/Fourier-Curve-Tracing.jpg
901
947
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-12-24 11:28:162017-04-14 13:53:12Fourier Curve Tracing https://mechanicaldesign101.com/wp-content/uploads/2015/11/SIAMnews-e1469999783791.jpg
285
400
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-11-20 08:40:562017-04-14 13:54:48SIAM News: Biologically inspired linkage design
https://mechanicaldesign101.com/wp-content/uploads/2015/11/SIAMnews-e1469999783791.jpg
285
400
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-11-20 08:40:562017-04-14 13:54:48SIAM News: Biologically inspired linkage designMicro-linkages for Compliant Material
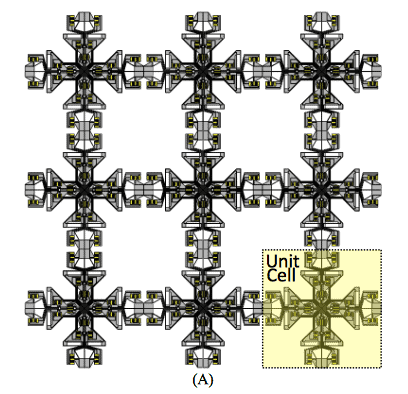
Material Unit Cell
Lucas Shaw and Prof. Jonathan Hopkins show the micro-architecture of an actively compliant material. Micro-actuators within the unit cells of an assembly are coordinated to reshape the assembly as desired. This was presented as part of the 2015 ASME Design Engineering Technical Conferences in Boston, MA, August 2-5. The video below shows what this assembly can do.
[youtube]https://www.youtube.com/watch?v=pPXMtlP_OAQ[/youtube]
Actuating Morphing Linkages
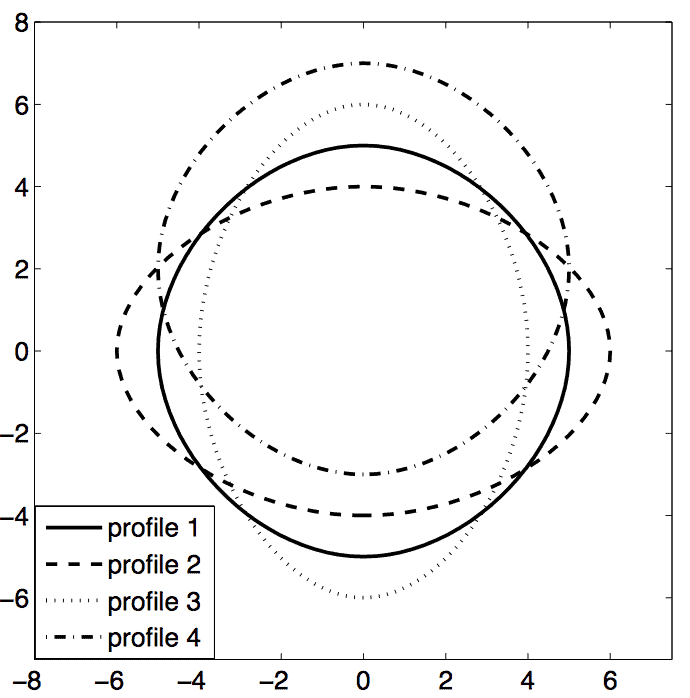
Target Profiles for Morphing Linkage
Lawrence Funke and Prof. James Schmiedeler of the University of Notre Dame Locomotion and Biomechanics Lab show that the movement of a morphing linkage through its target profiles can be improved by coordinating actuation of the sub-chains. This was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. The video below shows the improvement obtained by moving from 1 to 3 coordinated actuators.
[youtube]https://www.youtube.com/watch?v=r3DwHyRAh08[/youtube]
Rolling Robot at SUTD
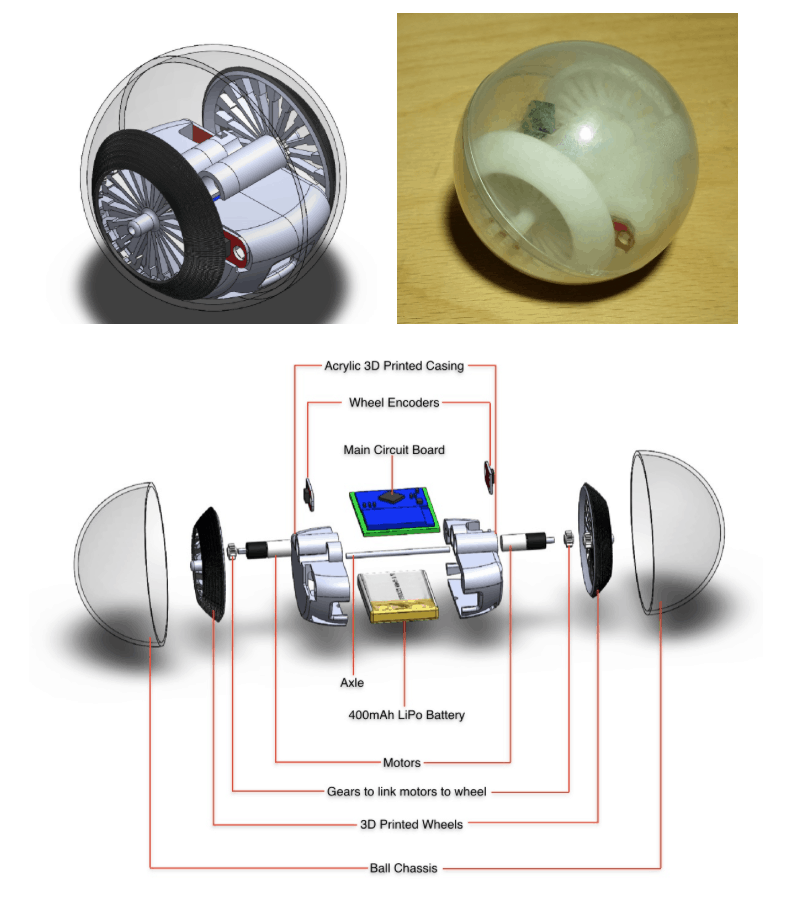
Virgo 2 SUTD
A research team including Profs. GimSong Soh, Kristin Wood and Kevin Otto at Robotics Innovation Lab at the Singapore University of Technology and Design has developed a rolling robot about the size of a baseball. The design and motion planning of this robot, Virgo 2.0, was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. A demonstration of the Virgo 2.0 moving through a figure eight path around obstacles is shown in the video below.
[youtube]https://www.youtube.com/watch?v=z9nZbOlhSqw[/youtube]
Interesting Planar Robot at Laval
[youtube]https://www.youtube.com/watch?v=_vp1ELEtDN4[/youtube]
Students of Prof. Clement Gosselin at the Laval University Robotics Laboratory demonstrate a four-degree of freedom planar robot. I particularly like the demonstration of its use as a gripper that does a cartwheel just for fun.
Tensegrity Robotics at UC Berkeley
[youtube]https://www.youtube.com/watch?v=ZwYXfijMet0[/youtube]
Students in Prof. Alice Agogino’s Berkeley Emergent Space Technologies Laboratory, the BEST Lab, working on motion planning for their tensegrity robot.
Origami Art at BYU

Origami Art BYU
Mechanical engineering students in Prof. Larry Howell’s Compliant Mechanisms Research Group designed and constructed this kinetic structure for the BYU Museum of Art. It illustrates paper folding known as origami.
[youtube]https://www.youtube.com/watch?v=5e28J066oGY[/youtube]