This Spring quarter 60 students divided into 15 teams to design and build robot walkers. Two stepper motors drive a set of legs on each side. These legs are formed from a pair of six-bar linkages that provide coordinated rectilinear movement of two feet on each side providing stable legged locomotion.
I am always amazed by the creativity of the students in the design of the personalities of these walkers.
The ribbons and medals decorate the walkers with the three best times through our autocross course.
This robot walker has two drive motors, one for each side. Four rectilinear legs on each side provide a smooth and stable gait. Steering is achieved by changing the relative speeds of the two motors. This is another excellent design by Ken Nguyen.
https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker
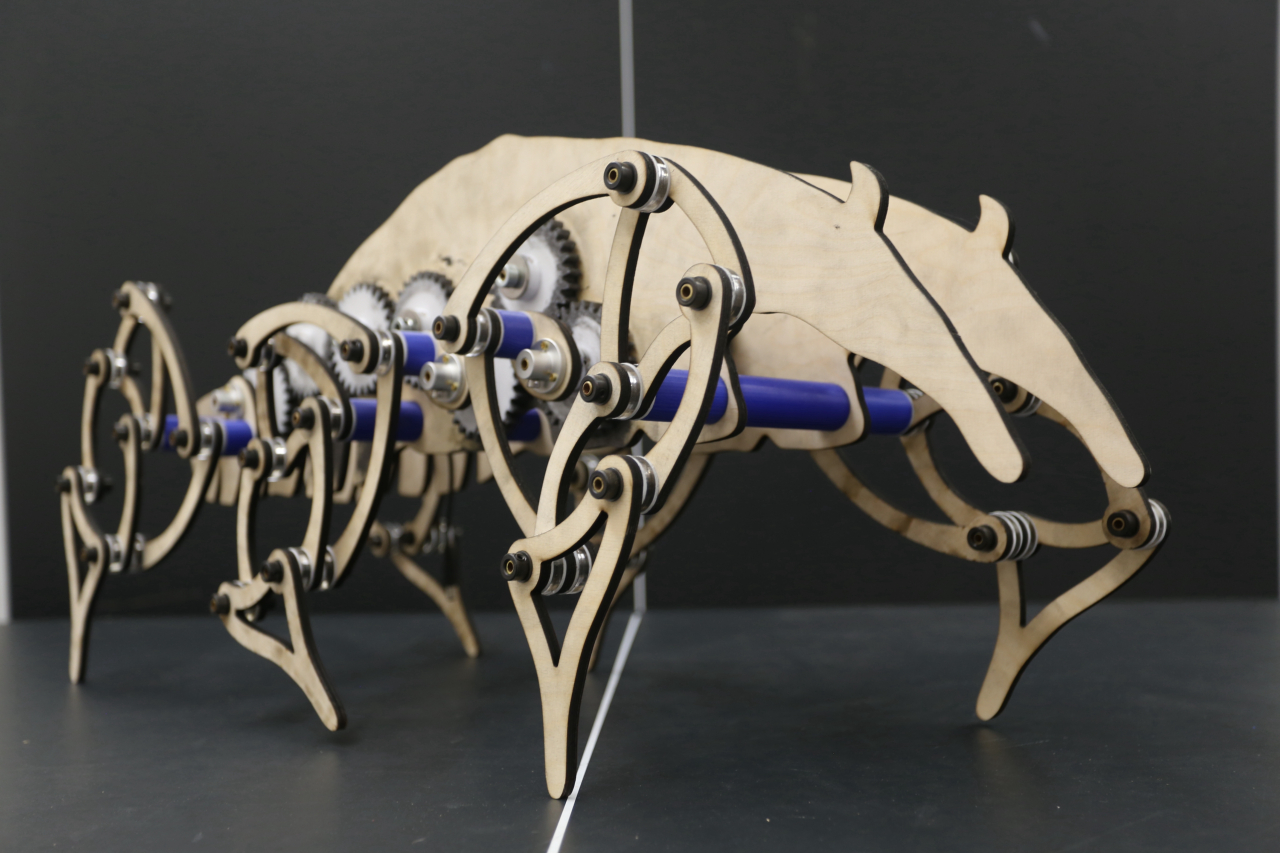
This is the latest walker design from Ken Nguyen. His designs demonstrate the effectiveness of the rectilinear leg. We used one of his designs as the prototype for our Halloween walkers. Here he demonstrates the use of these legs in a four-legged walker. Please take a look.
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker
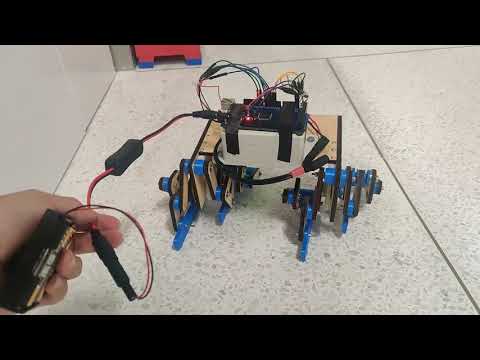
This walking robot has four legs and only two actuators. Usually a walking robot has two actuators for each leg, so four legs means eight actuators. Our goal has been to find ways to reduce the number of actuators and the associated control burden and still have an effective walking robot. This prototype was developed in collaboration with Chenhao Liu at SUSTech (Southern University of Science and Technology, Sichuan, China) with Jiaji Li at UCI (University of California, Irvine) that started with the UCInspire program last Summer 2022 and continues into 2023.
https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg360480Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators
These Halloween robots were delivering candy at UCI on October 31, 2022. For Fall 2022, we were back to in person project-based learning and the students responded enthusiastically. Over the summer we improved the joint design as well as the drive train, and we focussed on two legs to simplify the construction. The result was an improvement in overall performance that lays the groundwork for the future. Please take a look.
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots
This lecture describes my approach to project-based learning for Kinematic synthesis, which I developed while on sabbatical at Stanford University. I presented this lecture at the 2019 Kinematics Summer School organized by Anurag Purwar. Since that time, we have gotten better at making these walking robots easier to build and more reliable.
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots
Kempe’s Universality Theorem states that every algebraic curve has an associated linkage that draws the curve. A popular phrasing of this theorem is “a linkage exists that can sign your name”. This lecture summarizes our efforts to find simplified versions of curve-drawing linkages. A remarkable outcome is the ability to mechanically draw Bézier curves, which yields a linkage system that can sign your name, and even write cursive Chinese. I was honored to return to the University of Pennsylvania’s Grasp Lab after over 30 years to make this presentation. This highlights the excellent work Yang Liu.
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve
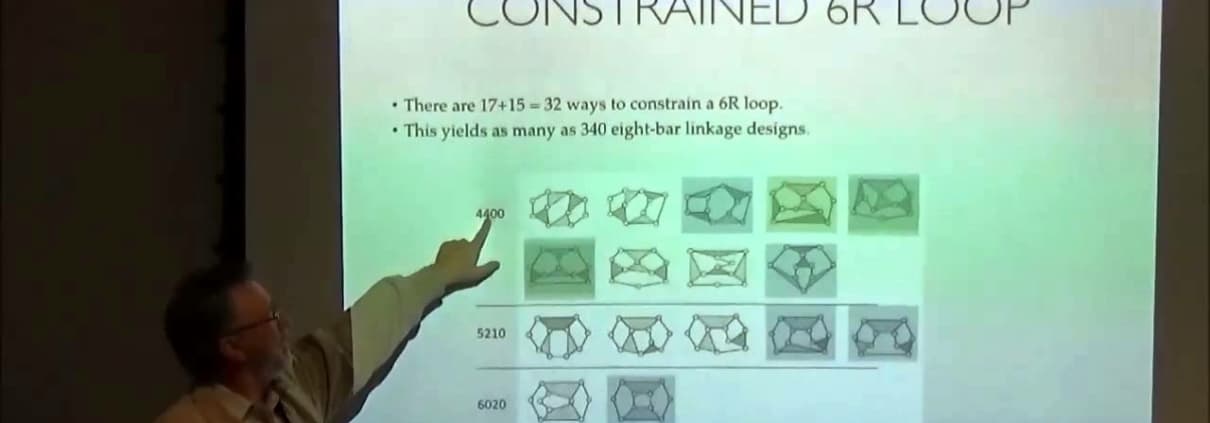
This is my lecture from the 2014 Kinematics Summer School organized by Anurag Purwar and is my best summary of the status of kinematic theory for the synthesis of planar six-bar and eight-bar linkages. It highlights the excellent work of Mark Plecnik, Kaustube Sonawale, Brian Parrish and Brandon Tsuge.
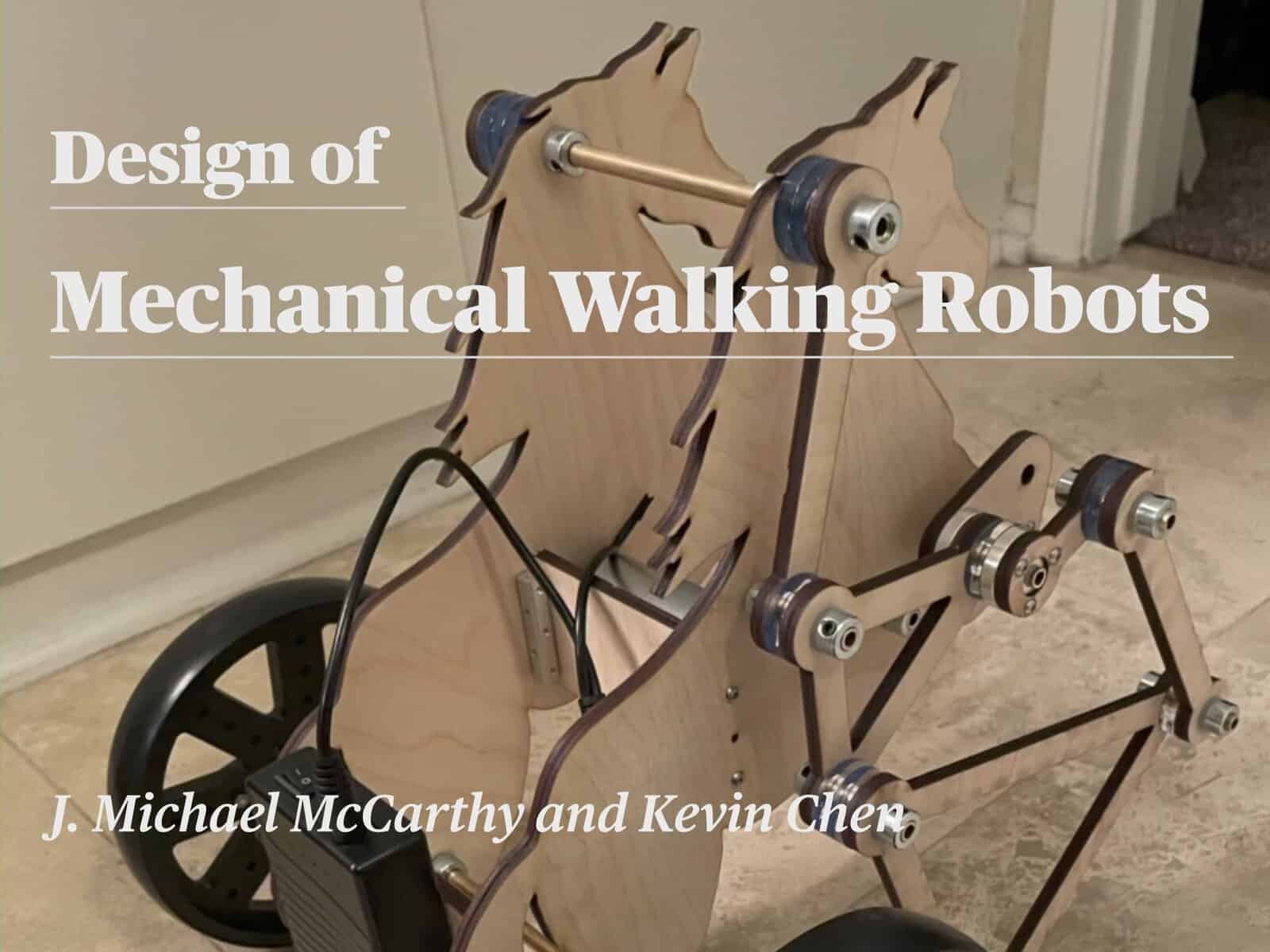
In this book, we present the detailed design of mechanical walking robots that are driven by a single motor. These walkers rely on specially designed leg mechanisms coordinated by gear trains in order to walk, rather than multiple computer controlled motors per leg. The result is a simplified walking robot that provides a platform for other mechanical and electronic functions.
Two, four and six legged walkers are presented that implement different types of leg mechanisms and power trains. In each case, we provide drawings for a laser cut wood or acrylic chassis, 3D printed parts and a complete parts list. Several of the designs implement an additional motor for steering as well as electronic components and software for speed control.
Our goal is to provide enthusiasts of all backgrounds what they need to build a walking robot at home, to explore new design ideas, and, perhaps, to enjoy the operation of one of these robots as it moves across the ground.
I am pleased to provide the presentations from the 2012 National Science Foundation Workshop on 21st Century Kinematics. These presentations provide insight to the challenges and opportunities for research in mechanical systems and robotics.
The NSF Workshop on 21st Century Kinematics at the 2012 ASME IDETC Conference in Chicago, IL on August 11-12, 2012 consisted of a series of presentations and a book of supporting material prepared by the workshop contributors.

 MDA Press
MDA Press




 MDA
MDA