
Introduction to Linkages

Introduction to Linkages
Please select this link to open the Geogebra Book containing constructions of a number of interesting linkages. This is an introduction to the useful movement available with articulated systems.

Introduction to Linkages
Please select this link to open the Geogebra Book containing constructions of a number of interesting linkages. This is an introduction to the useful movement available with articulated systems.

JPL’s ATHLETE Rover (image from paper cited below)
The ATHLETE Rover is a mixture of a wheeled rover and a walking robot, or better a walking truck, created by engineers at Jet Propulsion Laboratory to be used for manned and unmanned missions to the moon. ATHLETE, which stands for All-Terrain Hex-Limbed Extra-Terrestrial Explorer, is a six-legged walker that is taller than a person. The walker also rolls since it has powered wheels at the end of each limb. This allows the ATHLETE great mobility over changing terrain.
An innovation that comes from the leg-wheel combo is the Sliding Gait, which is a mode of transport more efficient than walking that can be used over loose or steep terrain where driving is impossible. Sliding Gait uses some of the articulated legs as anchors while others do the walking or sliding, like skating. This allows for quicker more responsive movement of the robot. The ATHLETE is to be remote controlled from earth or by astronauts on the moon, so the many different ways the machine can travel give more options to a remote user to navigate tricky terrain.

ATHLETE at work (image from paper cited below)
Motion planning is critical to the operation of ATHLETE because it is both a walker, a rover and something in between, so it takes some work to plan out each step. Footfall is the software that assists the remote driver in planning each step. It uses “telemetry from the robot, such as joint angles and stereo camera image pairs, and generates 3D terrain map,” computes a sequence of movement commands and presents an animated preview to the driver. Footfall makes it possible for this big robot to really move.
Citations:
“FootFall: A Ground Based Operations Toolset Enabling Walking for the ATHLETE Rover,” by Vytas SunSpiral, Daniel Chavez-Clemente, Michael Broxton, Leslie Keely, Patrick Mihelich, David Mittman, and Curtis Collins.
“Sliding Gait for Athlete Mobility,” NASA Techbrief, This work was done by Julie A. Townsend, Curtis L. Collins, and Jeffrey J. Biesiadecki of Caltech for NASA’s Jet Propulsion Laboratory.
Read more about the ATHLETE Rover at JPL’s Website
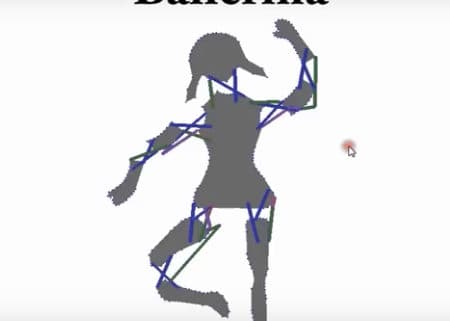
Researchers at Disney Research Zurich provide yet an other design system with the goal of moving digital character design into physical form. This work by Vittorio Megaro (ETH Zurich) and Bernhard Thomaszewski (Disney Research Zürich) and their colleagues can be viewed as two-position synthesis of four-bar “joints” that connect bodies in a serial chain, which are then driven by a sequence of four-bar function generators. They 3D print the result to obtain a cartoon character that moves with the rotation of a crank. Select this link for more information.
BYU Professor Larry Howell studies lamina emergent mechanisms, in other words, machines that emerge from flat pieces of material. If you think about the subtly complex movement of a children’s pop-up book, the way a page elegantly untucks itself to display a scene and then tucks itself back in, you wouldn’t be too far off. The interesting thing about lamina emergent mechanisms is that they are compliant mechanisms that come out of a plane—out of a flat surface—which allows for a low cost of manufacturing. The trick is that designing something like this is challenging, and indeed “design of lamina emergent mechanisms that have not previously been possible” is the big challenge this research pushes up against.
Lamina emergent mechanisms, or LEMs, can perform sophisticated tasks with simple topology. The cost efficiency of this type of mechanism starting from a flat initial state means that there is the potential for very affordable manufacturing. Since these mechanisms “pop out” of flat materials, manufacturing them in large quantities is cost effective since the associated manufacturing processes for replicating sheet materials are relatively simple and therefore low cost.
Lamina emergent mechanisms are notable because they save space. They emerge from a flat initial state so they can be used in applications that have limited space, which is oftentimes a design challenge. From a business perspective, these mechanisms are attractive because they can be made compact for shipping and then later deployed in their designed function at the desired location when they need to be. Reductions in handling, shipping, and storing, particularly in high volume, can lead to significant cost savings.

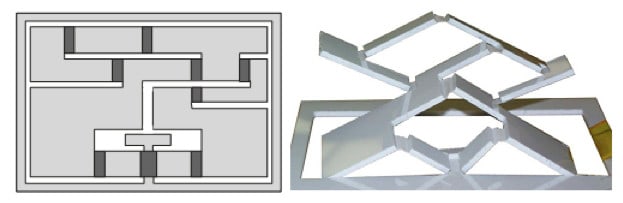
Another thing to note is that these mechanisms can interact with one another in interesting, useful ways, as seen in this image.
The word that comes to mind with lamina emergent mechanisms is efficiency. We’ve talked about efficiency in manufacturing, but now let’s talk about efficiency at the machine level. The creation of controlled motion without bearings leads to opportunities for increased precision because of the elimination of backlash and wear, reduction of friction between rubbing parts, and the lack of a need for assembly since the devices are single-piece constructions. There are a lot of wins with LEMs, which means they have a bright future.
A key to the continued advancement of LEMs and their applications is the development of actuation approaches to allow them to move. – BYU Compliant Mechanisms Research Website
Professor Craig Lusk (University of South Florida) works in the same field and designs shape shifting mechanisms that could be used for statically balanced body armor that could take the form of a collapsible shield or provide full body coverage.
Select here to see Professor Howell’s presentation on LEMs at the Workshop on 21st Century Kinematics.
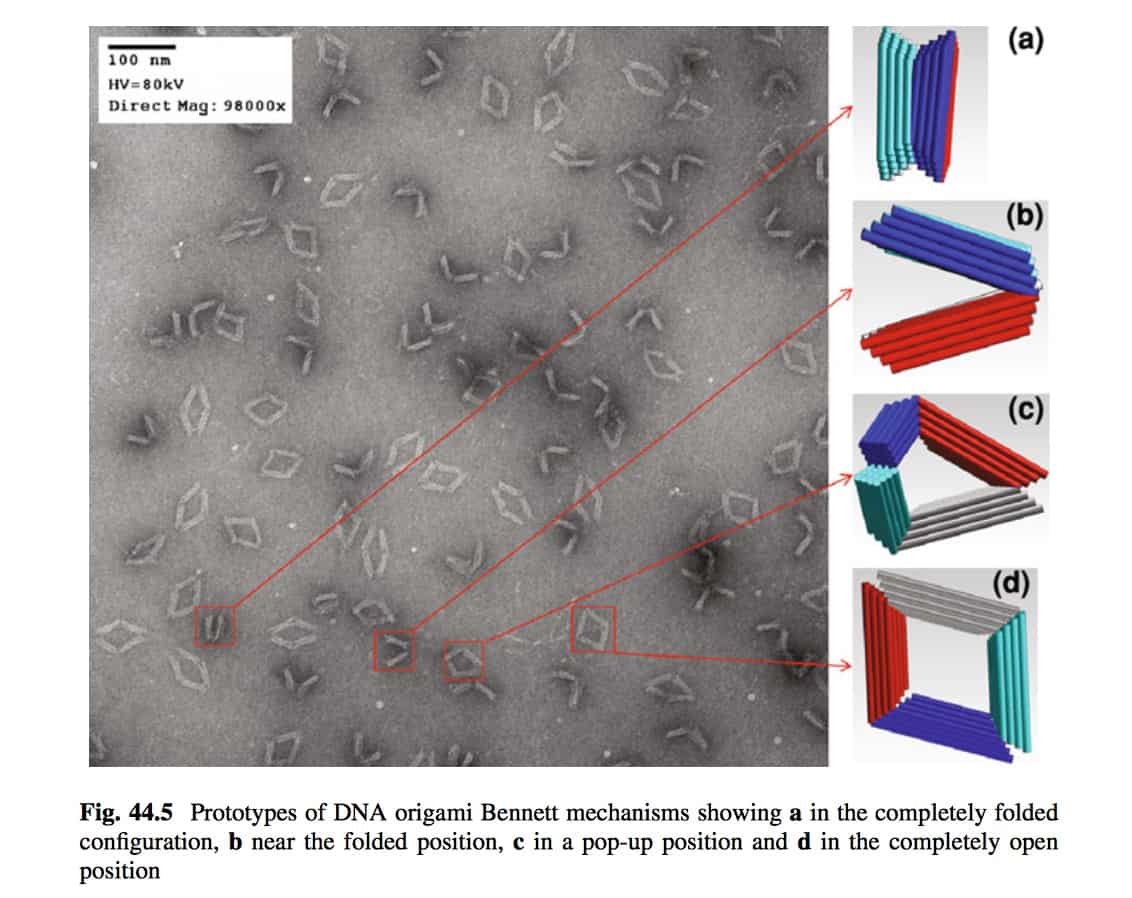
DNA origami mechanisms from Advances in Reconfigurable Mechanisms and Robots, Springer 2012
Professors Carlos Castro and Haijun Su have developed what they call DNA Origami Machines and Mechanisms to pave the way for new small scale devices that could revolutionize medicine, manufacturing, and environmental sensing.
DNA Mechanisms made from links of relatively rigid dsDNA bundles joined by soft ssDNA strands have the potential to provide machines for molecular transport in bioreactors, targeting cancer cells for drug delivery, or even repairing damaged tissue.
Protein is an attractive material for machine construction because there is a huge range of naturally occurring protein-based molecular machinery, but it has been difficult to control proteins structures due to the multitude of complex amino acid interactions that govern protein folding. DNA, however, self-assembles by base pairing and base stacking interactions, natural processes that these researchers essentially “plug in to” to create, manipulate, and “tune” compliant structures. This has led to research on how to use DNA in machine design.
The recent development of scaffolded DNA origami has enabled the construction of nanoscale objects with unprecedented 3D structural complexity by self-assembly. To quote Professor Su’s paper, “We … locally bend bundles of double-stranded DNA into bent geometries whose curvature and mechanical properties can be tuned by controlling the length of ssDNA strands.” This demonstrates a mechanical model that predicts both their geometry and mechanical properties.
As Professor Su states, they are working to “provide a basis for the design of mechanically functional DNA origami devices and materials.” DNA origami mechanisms open an interesting frontier in machine design at the nano level. It is a continuance of mechanical progress that has been a part of engineering for centuries with a potential that until now has been merely the subject of science fiction.
References:
DNA Origami Compliant Nanostructures with Tunable Mechanical Properties: Lifeng Zhou, Alexander E. Marras, Hai-Jun Su, and Carlos E. Castro, Dec. 18, 2010
Design and Fabrication of DNA Origami Mechanisms and Machines, Haijun-Su, Carlos Ernesto Castro, Alexander Edison Marras, Michael Hudoba; Advances in Reconfigurable Mechanisms and Robots, 2012, pp. 487-500
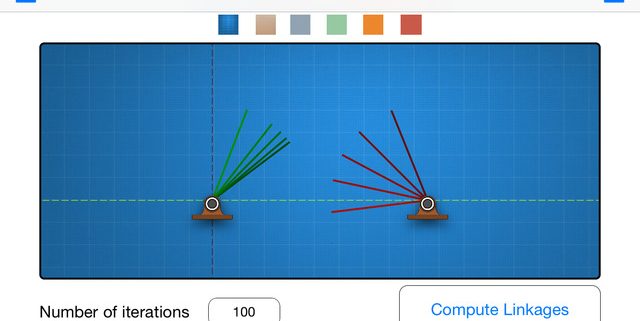
The MechGen iPad App helps you design a link that connects an input crank to the coordinated rotation of an output crank. Locate the two cranks and define their input and output angles and let MechGen FG design linkages for you. The design data and an animation of your linkage is easily distributed by email.
The use of linkages for calculation dates back to Charles Babbage’s “difference machine” from the mid 19th century. One hundred years later, Svoboda designed mechanical computers to direct artillery by fitting the input-output properties of linkages to a desired function. In 1954, Freudenstein used the newly developed digital computer to find a simple linkage that computed complex functions. This introduced computer-aided design by numerical solution of polynomial synthesis equations derived from linkage loop equations.
Today the design algorithms for six and eight bar function generators push the limits of computational ability.
MechGen FG helps the designer because it repeatedly makes routine calculations that would otherwise be very difficult, and it creates many candidate designs, which is where computational power comes into play.

An example design that the MechGen app will solve for you is that of a trashcan lid connected by a link to a foot pedal designed to open it. You want the lid to open 100 degrees so that it creates a large opening for you to put trash in it without the lid getting in the way of the entrance (because that is an annoying thing for people to deal with and this is a concern with this product) and being over 90 degrees will allow it to rest or stay open instead of falling back down and closing, but you also don’t want a person to have to move the pedal over too big a distance; you want the pedal to only move 20 degrees so it’s easy for a person to do.
This is a nice design problem. How do you get a lid to swing 100 degrees when you move a pedal 20 degrees? Well, you can start with the MechGen FG App.

Find out more on iTunes. This app is a collaboration of Kaustubh Sonawale and Jeffrey Glabe.
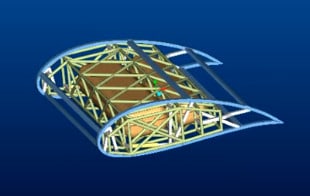
A design problem that engineers frequently encounter is a curve that changes shape. For instance, take a spoiler on a high performance car. To get optimal performance, the downward force should be increased as the car takes a turn. An ideal way to achieve this is to allow the spoiler to change shape. This is no simple design task because an engineer wants the spoiler to remain a spoiler and do its job at every intermediary stage as it changes shape. To use another example, you don’t ever want a wing to stop being a wing. But you might want to enable a wing to change its shape during flight.
Professor Andrew Murray, Associate Professor Dave Myszka, and Dave Perkins (all of University of Dayton), along with Associate Professor Jim Schmiedeler (of Notre Dame) and the students at University of Dayton’s Design of Innovative Machines Lab (DIMLab) are working on new technology to tackle these problems. Their work focuses on the theory and design of “morphing or adaptive structures” that can essentially change shape and still perform their function “through a wider range of operating conditions.” Design applications of this research include wings, extrusion dies, deformable mirrors for adaptive optics systems, morphing architectural structures, active aperture antennas, and (to come back down to Earth for a moment), pasta makers.
Shape-Changing Wing with Internal Structure
Die design is an interesting manufacturing application of this research. A die is used in a manufacturing process where melted plastic or other such material, like pasta dough, is forced through a die in order to “form a long part of uniform cross-section” like tubes, pipes, molding — and fusilli. Professor Murray and his colleagues and students have applied their research to designing a die that can change shape as material is fed through it, enabling manufacturers to create new innovative products at low cost compared to other currently available technology like molding.
For more information on this research, visit DIMLab. See video demonstrations of this technology here. For reference material, see Persinger, J., Shmeideler, J., Murray, A., 2009, “Synthesis of Planar Rigid-Body Mechanisms Approximating Shape Changes Defined by Closed Curves.” The spoiler and compliant wing featured in the videos in this article were engineered by Seb Krut.

Training people to diffuse landmines and other live ordnance left behind in conflict areas has always been a difficult thing. Successfully training Explosive Ordnance Disposal (EOD) Technicians requires hands-on education that gives the technician a true understanding of how a triggering mechanism inside live ordnance actually functions. For this reason, this kind of education requires effective training aids. The traditional training aids–either replicas or inert ordnance–are fragile, difficult to make, too intricate to be understood fully, hard to obtain in the case of inert ordnance, and impossible to ship internationally. Allen Tan from Golden West Humanitarian Foundation in collaboration with Asst. Professor Gim Song Soh and his students at Singapore University of Technology and Design have come up with an innovative solution to the problems this type of education presents.
They have created training aids that are engineered for a better understanding of how ordnance trigger mechanisms work. The plastic training aids display exact replicas of trigger mechanisms in cross-section, which gives the future ordnance disposal technician a better view of the kinds of mechanisms they will find in a real mine field. The AOTM devices are also resilient enough for classroom teaching.

How are these devices delivered to the various regions around the world where they are needed? They’re not. They’re 3-D printed. This innovation not only defeats the impossibility of shipping this kind of item all over the world, it also centralizes the construction of the devices in the region where they will be used. Countries benefit from this development of “sustainable indigenous assets capable of dealing with these issues as they are discovered” rather than putting the training in the hands of a third party (quote from Advanced Ordnance Training Materials by Allen Tan). It is a more sustainable way to run this kind of program.
Better training materials and affordable ways of providing them will lead directly to more effective—and safer–ordnance disposal programs around the world. The work that Professor Soh and his students at Singapore University of Technology and Design are doing with advanced ordnance teaching materials combines design innovation, active learning practice, and a forward-thinking embrace of 3D printing.
For more information please visit eodtrainingaids.com, Professor Gim Song Soh’s homepage, and an article written by Allen Tan.
This animation prepared by Prof. Soh and his students illustrates the components of the SOTS-M2A1 trigger mechanism.

Wearable electronics or “wearables” are seen as the next great wave of technology and commerce. Much of the popular talk about these kinds of products revolves around things like fitness trackers, augmented reality devices, and other machines you can wear that interact with, track, or add on to your experience with the world around you. Thomas Sugar, a professor at Arizona State University Polytechnic Campus and a wearable robotics expert works on a different kind of wearable.
Along with his colleagues and students, he has developed a new generation of powered prosthetic devices that can be used for rehabilitation and as prosthetics for amputees. He works on spring-based robots that enhance human mobility based on lightweight energy storing springs that allow for a more responsive and therefore more functional human gait. His devices make position control calculations 1,000 times per second to make the prosthetics as human as possible.

Sugar starts from a “human being first” research perspective since his devices must be wearable and efficient. In his devices, spring power and motor power combine to create a powered system that gives prosthetic ankles the “push off” and “toe pick up” they need in order to mimic the function of human ankles.
His idea of a robotic tendon is much more efficient than a direct drive system, which would require more electricity and larger, more powerful motors. In fact, his innovation uses half the required energy of a direct drive system powered prosthetic ankle.
In a different device attached to the ankle Sugar uses able-bodied movement to harvest energy from walking. His company SpringActive developed a boot attachment with the military in mind that turns walking into back up power for batteries with negligible metabolic cost.
The real world and commercial applications for this kind of research are far reaching. For more on Thomas Sugar’s and his colleagues’ work, visit SpringActive.com and http://innovation.asu.edu/

MechGen 3
Please see our Singular Designs web-site. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks. Also see Mechanism Generator.