
Kinematic Synthesis of Mechanisms
 MDA
https://mechanicaldesign101.com/wp-content/uploads/2023/03/IMG_0668-scaled.jpeg
2560
1920
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-03-14 07:36:052023-03-14 07:36:25GNK Steerable Robot Walker
MDA
https://mechanicaldesign101.com/wp-content/uploads/2023/03/IMG_0668-scaled.jpeg
2560
1920
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-03-14 07:36:052023-03-14 07:36:25GNK Steerable Robot Walker https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker
https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators
https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 13:47:252023-01-01 13:47:25Kinematics Lecture: Six-bar and Eight-bar Linkage Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 13:47:252023-01-01 13:47:25Kinematics Lecture: Six-bar and Eight-bar Linkage Synthesis https://mechanicaldesign101.com/wp-content/uploads/2021/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-12-03 16:13:322022-09-17 09:25:53Fall 2021 Mechanical Walker Designs
https://mechanicaldesign101.com/wp-content/uploads/2021/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-12-03 16:13:322022-09-17 09:25:53Fall 2021 Mechanical Walker Designs https://mechanicaldesign101.com/wp-content/uploads/2016/06/MechGenSP-ipad-1.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-10-28 09:30:282021-12-03 15:50:54MechGen Software Privacy Policy
https://mechanicaldesign101.com/wp-content/uploads/2016/06/MechGenSP-ipad-1.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-10-28 09:30:282021-12-03 15:50:54MechGen Software Privacy Policy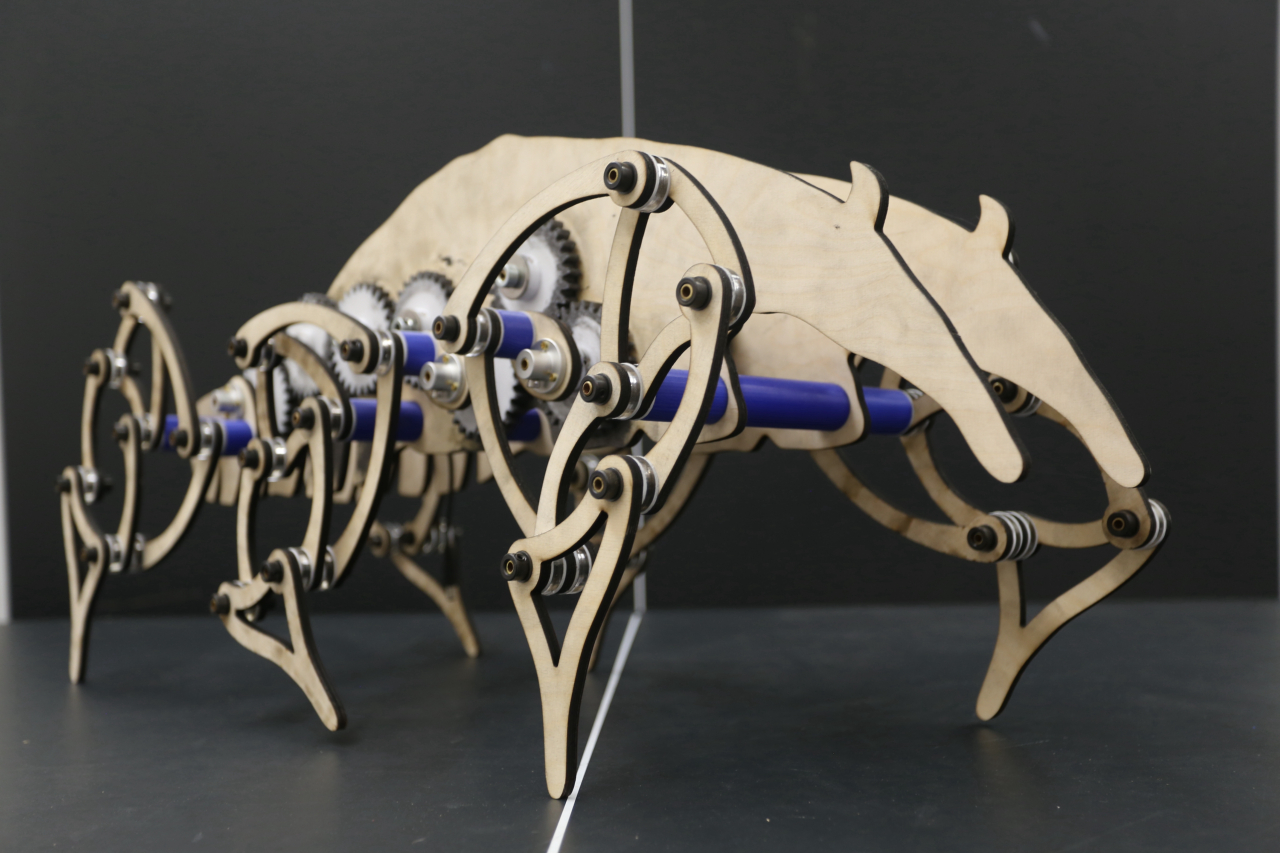 MDA
https://mechanicaldesign101.com/wp-content/uploads/2021/09/Anteater-Walker-pdf.jpg
853
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-09-17 16:13:462021-09-17 16:36:20Design of Mechanical Walking Robots
MDA
https://mechanicaldesign101.com/wp-content/uploads/2021/09/Anteater-Walker-pdf.jpg
853
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-09-17 16:13:462021-09-17 16:36:20Design of Mechanical Walking Robots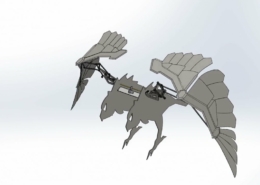 https://mechanicaldesign101.com/wp-content/uploads/2021/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-06-07 13:19:352022-09-17 09:25:54Wing Mechanisms
https://mechanicaldesign101.com/wp-content/uploads/2021/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-06-07 13:19:352022-09-17 09:25:54Wing Mechanisms MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.24.54-PM.png
832
1206
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:31:112020-07-19 17:33:27The Bored Robot: Controlling Two Drive Motors for a Walking Machine
MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.24.54-PM.png
832
1206
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:31:112020-07-19 17:33:27The Bored Robot: Controlling Two Drive Motors for a Walking Machine MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.12.37-PM.png
799
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:15:522020-07-19 17:39:58How to Fix SW Motion Analysis Error: Too Many Redundant Constraints
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2020/07/Screen-Shot-2020-07-19-at-5.12.37-PM.png
799
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-07-19 17:15:522020-07-19 17:39:58How to Fix SW Motion Analysis Error: Too Many Redundant ConstraintsMachine Design
 https://mechanicaldesign101.com/wp-content/uploads/2017/01/DMG-LIB-Library.png
623
1219
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-01-16 20:00:492017-04-14 13:45:14DMG-LIB.org mechanism library
https://mechanicaldesign101.com/wp-content/uploads/2017/01/DMG-LIB-Library.png
623
1219
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-01-16 20:00:492017-04-14 13:45:14DMG-LIB.org mechanism library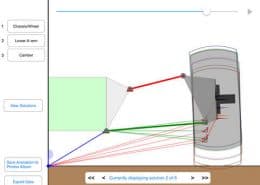 https://mechanicaldesign101.com/wp-content/uploads/2016/06/SP-ipadshot4.jpeg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-06-30 21:40:062022-09-17 09:30:58MechGen Suspension
https://mechanicaldesign101.com/wp-content/uploads/2016/06/SP-ipadshot4.jpeg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-06-30 21:40:062022-09-17 09:30:58MechGen Suspension https://mechanicaldesign101.com/wp-content/uploads/2013/04/Veyron-W16.jpg
544
1124
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 05:18:542017-01-25 07:58:01W16 Veyron engine
https://mechanicaldesign101.com/wp-content/uploads/2013/04/Veyron-W16.jpg
544
1124
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 05:18:542017-01-25 07:58:01W16 Veyron engine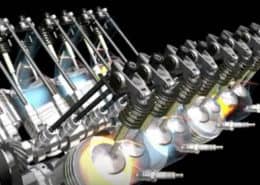 https://mechanicaldesign101.com/wp-content/uploads/2013/04/V8-Valves.jpg
548
986
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 05:03:142017-01-25 07:58:58Cam actuation in a V8 engine
https://mechanicaldesign101.com/wp-content/uploads/2013/04/V8-Valves.jpg
548
986
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 05:03:142017-01-25 07:58:58Cam actuation in a V8 engine https://mechanicaldesign101.com/wp-content/uploads/2013/04/Diesel-Engine.jpg
588
994
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 04:57:322017-01-25 07:59:59Diesel engine animation
https://mechanicaldesign101.com/wp-content/uploads/2013/04/Diesel-Engine.jpg
588
994
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 04:57:322017-01-25 07:59:59Diesel engine animation https://mechanicaldesign101.com/wp-content/uploads/2013/04/animatedengines.jpg
680
776
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 04:47:462017-01-25 08:00:49Engine animations
https://mechanicaldesign101.com/wp-content/uploads/2013/04/animatedengines.jpg
680
776
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-04-18 04:47:462017-01-25 08:00:49Engine animations https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-25 07:17:022022-09-17 09:25:56Spherical Four-bar Linkage Design: Mech Gen 4
https://mechanicaldesign101.com/wp-content/uploads/2012/08/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-25 07:17:022022-09-17 09:25:56Spherical Four-bar Linkage Design: Mech Gen 4 https://mechanicaldesign101.com/wp-content/uploads/2012/07/DesignExchange.jpg
80
360
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-07-09 15:10:282022-07-07 12:13:57Design Exchange and HCD Connect
https://mechanicaldesign101.com/wp-content/uploads/2012/07/DesignExchange.jpg
80
360
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-07-09 15:10:282022-07-07 12:13:57Design Exchange and HCD Connect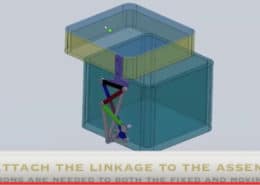 https://mechanicaldesign101.com/wp-content/uploads/2012/03/MechGen-3.jpg
544
1256
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-03-21 01:20:342017-01-24 17:50:04Mechanism Generator 3.0
https://mechanicaldesign101.com/wp-content/uploads/2012/03/MechGen-3.jpg
544
1256
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-03-21 01:20:342017-01-24 17:50:04Mechanism Generator 3.0 https://mechanicaldesign101.com/wp-content/uploads/2012/01/MechGen-2.jpg
413
815
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-06 07:46:042022-09-17 09:45:03Mechanism Generator 2.0 (MechGen 2)
https://mechanicaldesign101.com/wp-content/uploads/2012/01/MechGen-2.jpg
413
815
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-01-06 07:46:042022-09-17 09:45:03Mechanism Generator 2.0 (MechGen 2)Lecture Notes
 MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/10/BYU-Zoom-Lecture.jpg
691
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-10-18 11:27:502023-10-19 08:57:06Quaternions in Kinematics: BYU Lecture
MDA Press
https://mechanicaldesign101.com/wp-content/uploads/2023/10/BYU-Zoom-Lecture.jpg
691
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-10-18 11:27:502023-10-19 08:57:06Quaternions in Kinematics: BYU Lecture https://mechanicaldesign101.com/wp-content/uploads/2018/01/Intro-KSM.jpg
975
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-15 13:58:132019-05-26 12:07:18Introduction to Linkage Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2018/01/Intro-KSM.jpg
975
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-15 13:58:132019-05-26 12:07:18Introduction to Linkage Synthesis https://mechanicaldesign101.com/wp-content/uploads/2017/12/Screen-Shot-2017-12-04-at-10.24.45-PM.png
1152
1544
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-04 22:22:472017-12-13 22:03:30Curvature Theory for Planar Point Trajectories
https://mechanicaldesign101.com/wp-content/uploads/2017/12/Screen-Shot-2017-12-04-at-10.24.45-PM.png
1152
1544
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-04 22:22:472017-12-13 22:03:30Curvature Theory for Planar Point Trajectories https://mechanicaldesign101.com/wp-content/uploads/2017/12/T2-Two-and-Three-Position-Synthesis.png
1154
1548
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-04 16:57:162019-07-04 21:06:25Four-bar Linkage Synthesis, Two and Three Task Positions
https://mechanicaldesign101.com/wp-content/uploads/2017/12/T2-Two-and-Three-Position-Synthesis.png
1154
1548
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-04 16:57:162019-07-04 21:06:25Four-bar Linkage Synthesis, Two and Three Task Positions https://mechanicaldesign101.com/wp-content/uploads/2017/12/T1-Four-bar-Linkage-Analysis.png
1158
1544
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-04 16:24:452017-12-13 16:09:50Four-bar Linkage Analysis Notes
https://mechanicaldesign101.com/wp-content/uploads/2017/12/T1-Four-bar-Linkage-Analysis.png
1158
1544
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2017-12-04 16:24:452017-12-13 16:09:50Four-bar Linkage Analysis Notes https://mechanicaldesign101.com/wp-content/uploads/2017/09/typesynthesis.jpg
1051
1402
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2017-09-04 16:58:462019-03-29 21:35:50Type Synthesis, Assur Groups, and Rigidity
https://mechanicaldesign101.com/wp-content/uploads/2017/09/typesynthesis.jpg
1051
1402
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2017-09-04 16:58:462019-03-29 21:35:50Type Synthesis, Assur Groups, and Rigidity https://mechanicaldesign101.com/wp-content/uploads/2015/07/MK1-Schematic.jpg
570
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-14 12:45:432022-07-08 19:34:01MK.1 Mechanical Computer
https://mechanicaldesign101.com/wp-content/uploads/2015/07/MK1-Schematic.jpg
570
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-14 12:45:432022-07-08 19:34:01MK.1 Mechanical Computer https://mechanicaldesign101.com/wp-content/uploads/2015/01/Four-bar-function-generator.jpg
762
1012
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-01-18 09:46:012019-03-25 21:19:26Four-bar function generator: Open a door
https://mechanicaldesign101.com/wp-content/uploads/2015/01/Four-bar-function-generator.jpg
762
1012
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-01-18 09:46:012019-03-25 21:19:26Four-bar function generator: Open a door https://mechanicaldesign101.com/wp-content/uploads/2014/12/Kinematics-Summer-School.jpg
157
1140
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-12-09 21:23:082022-09-17 09:40:49Kinematics Summer School
https://mechanicaldesign101.com/wp-content/uploads/2014/12/Kinematics-Summer-School.jpg
157
1140
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-12-09 21:23:082022-09-17 09:40:49Kinematics Summer School https://mechanicaldesign101.com/wp-content/uploads/2014/12/GeogebraBook.jpg
838
1082
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-12-02 16:35:092019-03-25 21:22:08Introduction to Linkages
https://mechanicaldesign101.com/wp-content/uploads/2014/12/GeogebraBook.jpg
838
1082
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-12-02 16:35:092019-03-25 21:22:08Introduction to Linkages https://mechanicaldesign101.com/wp-content/uploads/2013/05/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-14 15:02:522022-09-17 09:25:56Mechanical Advantage
https://mechanicaldesign101.com/wp-content/uploads/2013/05/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2013-05-14 15:02:522022-09-17 09:25:56Mechanical Advantage https://mechanicaldesign101.com/wp-content/uploads/2012/12/Svoboda-Computing-Mechanisms.jpg
355
819
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 18:43:262017-01-05 23:29:18A. Svoboda: Computing Mechanisms and Linkages
https://mechanicaldesign101.com/wp-content/uploads/2012/12/Svoboda-Computing-Mechanisms.jpg
355
819
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 18:43:262017-01-05 23:29:18A. Svoboda: Computing Mechanisms and Linkages https://mechanicaldesign101.com/wp-content/uploads/2012/12/Kempe-Straight-Line.jpg
452
1005
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 18:32:412017-01-05 23:52:16A. B. Kempe: How To Draw A Straight Line
https://mechanicaldesign101.com/wp-content/uploads/2012/12/Kempe-Straight-Line.jpg
452
1005
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-12-23 18:32:412017-01-05 23:52:16A. B. Kempe: How To Draw A Straight Line https://mechanicaldesign101.com/wp-content/uploads/2012/08/21Century-Poster-small.jpg
1600
1067
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-19 04:34:182017-01-05 23:37:38Workshop Presentations: 21st Century Kinematics
https://mechanicaldesign101.com/wp-content/uploads/2012/08/21Century-Poster-small.jpg
1600
1067
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2012-08-19 04:34:182017-01-05 23:37:38Workshop Presentations: 21st Century Kinematics https://mechanicaldesign101.com/wp-content/uploads/2017/12/Screen-Shot-2017-12-05-at-7.34.57-AM.png
784
1224
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-07-08 04:07:302017-12-05 07:50:46Machines on Wikipedia
https://mechanicaldesign101.com/wp-content/uploads/2017/12/Screen-Shot-2017-12-05-at-7.34.57-AM.png
784
1224
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-07-08 04:07:302017-12-05 07:50:46Machines on WikipediaHave a linkage design challenge? We can help.
 Contact us on this feedback form. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks.
Contact us on this feedback form. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks.
Linkage Synthesis Theory
The mathematical synthesis of linkage movement provides a powerful tool for invention. However, the specified task may not have useful solutions, and the search for successful tasks can be discouraging.
To address this, we automate the search and evaluation process within tolerance zones specified by the designer. These Mathematica notebooks implement our approach to finding defect-free four-bar linkage designs.
RR Constraint Synthesis for Function Generation

Synthesis of an RR Constraint
An important technique in kinematic synthesis is the design of an RR constraint that controls the movement of two joints of an existing serial chain. For a given RR serial chain, like OA shown above, we can specify its movement through five required task positions. This provides the information needed to design an RR constraint, GW above, that ensures the system moves through the required task positions.
This technique is called function generation in the kinematics synthesis literature, because the synthesized RR constraint maintains a specified relationship between the joint angles alpha and beta at joints O and A.

Select this link to download our Mathematica notebook: RR-Constraint Synthesis. It uses a given RR chain and the associated task to determine tolerance zones, where it searches for defect-free designs. As above, this file may download as text file so remove the .txt extension, then it should be readable by Mathematica. If you have any questions, please contact me.
Five-Position Synthesis of a Four-bar Linkage
Here we show a four-bar linkage designed to guide the coupler through five required task positions.
Please download and try our updated Mathematica notebook: Five-Position Synthesis. It searches in the vicinity of the required task for sets of positions that yield defect-free four-bar linkages. It may download as textfile so remove the .txt extension, then it should be readable by Mathematica.
The video below shows the operation of this notebook.
If you have any problems or advice, please contact me.