
Kinematic Synthesis of Mechanisms
 https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-19 16:58:302022-09-17 09:25:54Six-Legged Mechanical Walkers: Spring 2020 Highlights
https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-19 16:58:302022-09-17 09:25:54Six-Legged Mechanical Walkers: Spring 2020 Highlights https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-18 17:35:172022-09-17 09:25:54Prototype Four-Legged Mechanical Walker
https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-18 17:35:172022-09-17 09:25:54Prototype Four-Legged Mechanical Walker https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-17 14:19:492022-09-17 09:25:54Four-Legged Mechanical Walkers: Spring 2020 Highlights
https://mechanicaldesign101.com/wp-content/uploads/2020/06/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-17 14:19:492022-09-17 09:25:54Four-Legged Mechanical Walkers: Spring 2020 Highlights MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/06/Six-legged-walker-team-12.jpg
674
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-15 13:52:472020-06-15 13:55:03The Design of Mechanical Walkers: Spring 2020 Student Projects
MDA
https://mechanicaldesign101.com/wp-content/uploads/2020/06/Six-legged-walker-team-12.jpg
674
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2020-06-15 13:52:472020-06-15 13:55:03The Design of Mechanical Walkers: Spring 2020 Student Projects https://mechanicaldesign101.com/wp-content/uploads/2019/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 14:04:082022-09-17 09:25:54Fall 2019 Mechanical Walker Prototypes
https://mechanicaldesign101.com/wp-content/uploads/2019/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 14:04:082022-09-17 09:25:54Fall 2019 Mechanical Walker Prototypes MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-13-at-1.48.24-PM.jpg
777
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 13:51:112020-06-15 14:16:07Four-legged Mechanical Walkers: Teams 2, 4 and 5
MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-13-at-1.48.24-PM.jpg
777
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-13 13:51:112020-06-15 14:16:07Four-legged Mechanical Walkers: Teams 2, 4 and 5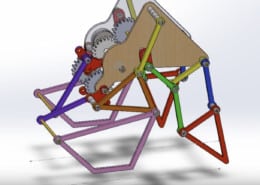 MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-08-at-1.02.45-PM.jpg
806
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-08 13:05:322019-12-08 13:07:54Four Legged Mechanical Walker: Teams 1, 3 and 6
MDA
https://mechanicaldesign101.com/wp-content/uploads/2019/12/Screen-Shot-2019-12-08-at-1.02.45-PM.jpg
806
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-12-08 13:05:322019-12-08 13:07:54Four Legged Mechanical Walker: Teams 1, 3 and 6 https://mechanicaldesign101.com/wp-content/uploads/2019/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-11-02 09:16:342022-09-17 09:25:54Halloween Display 2019
https://mechanicaldesign101.com/wp-content/uploads/2019/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-11-02 09:16:342022-09-17 09:25:54Halloween Display 2019 https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 21:52:562022-09-17 09:25:54More Halloween Linkage Designs
https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 21:52:562022-09-17 09:25:54More Halloween Linkage Designs https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 13:53:042022-09-17 09:25:54Halloween Design Project
https://mechanicaldesign101.com/wp-content/uploads/2019/10/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-10-30 13:53:042022-09-17 09:25:54Halloween Design Project https://mechanicaldesign101.com/wp-content/uploads/2019/06/Screen-Shot-2019-06-06-at-2.59.20-PM.jpg
1147
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-06-06 15:01:212019-12-06 09:17:44Mechanical Walker Project Animations: Spring 2019
https://mechanicaldesign101.com/wp-content/uploads/2019/06/Screen-Shot-2019-06-06-at-2.59.20-PM.jpg
1147
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-06-06 15:01:212019-12-06 09:17:44Mechanical Walker Project Animations: Spring 2019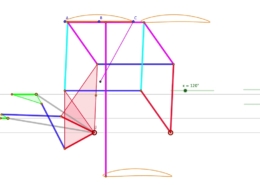 https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-23 16:52:012022-09-17 09:25:54Leg Mechanism for a Mechanical Walker
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-23 16:52:012022-09-17 09:25:54Leg Mechanism for a Mechanical Walker https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-15 11:42:172022-09-17 09:25:54Construction for Three-Position Synthesis of a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-15 11:42:172022-09-17 09:25:54Construction for Three-Position Synthesis of a Four-Bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-12 11:54:002022-09-17 09:25:54Five Position Synthesis of Four-bar Function Generators
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-12 11:54:002022-09-17 09:25:54Five Position Synthesis of Four-bar Function Generators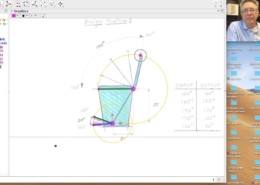 https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-11 13:03:012022-09-17 09:25:54Construction for Two-Position Synthesis of a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/05/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-05-11 13:03:012022-09-17 09:25:54Construction for Two-Position Synthesis of a Four-Bar LinkageMachine Design
 https://mechanicaldesign101.com/wp-content/uploads/2011/12/Oberlin1a.jpg
376
350
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-13 14:31:452017-01-05 23:39:33Instruments for Natural Philosophy
https://mechanicaldesign101.com/wp-content/uploads/2011/12/Oberlin1a.jpg
376
350
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2011-12-13 14:31:452017-01-05 23:39:33Instruments for Natural Philosophy https://mechanicaldesign101.com/wp-content/uploads/2010/11/Four-bar-Synthesis.jpg
646
902
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-25 09:00:322017-01-24 17:56:24Linkage Synthesis Demonstration
https://mechanicaldesign101.com/wp-content/uploads/2010/11/Four-bar-Synthesis.jpg
646
902
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-25 09:00:322017-01-24 17:56:24Linkage Synthesis Demonstration https://mechanicaldesign101.com/wp-content/uploads/2009/07/carbibles.com1.jpg
238
800
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-29 05:08:202022-07-08 19:31:41Automotive components
https://mechanicaldesign101.com/wp-content/uploads/2009/07/carbibles.com1.jpg
238
800
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-29 05:08:202022-07-08 19:31:41Automotive components https://mechanicaldesign101.com/wp-content/uploads/2009/07/Total-Materia.jpg
96
691
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-10 03:09:272017-01-05 22:46:47Unified Numbering System for Materials
https://mechanicaldesign101.com/wp-content/uploads/2009/07/Total-Materia.jpg
96
691
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-10 03:09:272017-01-05 22:46:47Unified Numbering System for Materials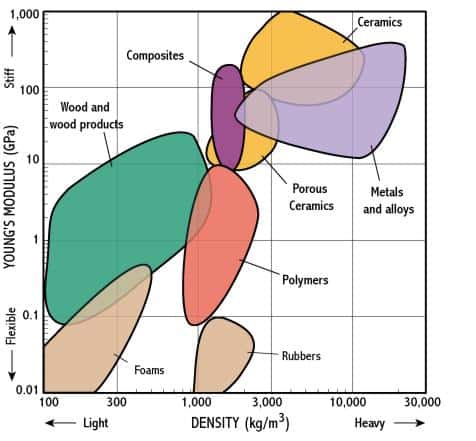 https://mechanicaldesign101.com/wp-content/uploads/2009/07/genericmaterials.jpg
441
476
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-07 16:30:212017-01-05 22:50:31Material Properties Charts
https://mechanicaldesign101.com/wp-content/uploads/2009/07/genericmaterials.jpg
441
476
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-07 16:30:212017-01-05 22:50:31Material Properties Charts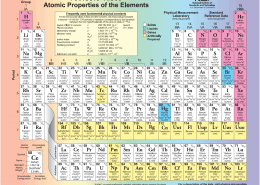 https://mechanicaldesign101.com/wp-content/uploads/2009/07/Periodic-Table.png
1238
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-06 16:48:102017-01-05 22:58:35NIST Periodic Table
https://mechanicaldesign101.com/wp-content/uploads/2009/07/Periodic-Table.png
1238
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-06 16:48:102017-01-05 22:58:35NIST Periodic Table https://mechanicaldesign101.com/wp-content/uploads/2009/07/ashbybook.jpg
240
240
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-03 07:09:572017-01-05 23:01:37Materials Selection in Mechanical Design
https://mechanicaldesign101.com/wp-content/uploads/2009/07/ashbybook.jpg
240
240
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-03 07:09:572017-01-05 23:01:37Materials Selection in Mechanical DesignLecture Notes
 https://mechanicaldesign101.com/wp-content/uploads/2010/12/Spherical-Fourbar.jpg
283
399
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-12-15 08:08:202017-01-07 22:35:50Spherical Four-Bar Linkages
https://mechanicaldesign101.com/wp-content/uploads/2010/12/Spherical-Fourbar.jpg
283
399
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-12-15 08:08:202017-01-07 22:35:50Spherical Four-Bar Linkages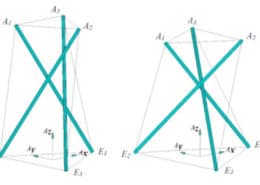 https://mechanicaldesign101.com/wp-content/uploads/2010/11/21st-Century-Kinematics.jpg
342
607
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-12 03:10:572017-01-07 22:40:4221st Century Kinematics
https://mechanicaldesign101.com/wp-content/uploads/2010/11/21st-Century-Kinematics.jpg
342
607
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-12 03:10:572017-01-07 22:40:4221st Century Kinematics https://mechanicaldesign101.com/wp-content/uploads/2010/11/Kinematics-and-Computers.jpg
585
969
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-07 19:26:162017-01-07 22:48:49Kinematics, Polynomials and Computers–A Brief History
https://mechanicaldesign101.com/wp-content/uploads/2010/11/Kinematics-and-Computers.jpg
585
969
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-11-07 19:26:162017-01-07 22:48:49Kinematics, Polynomials and Computers–A Brief History https://mechanicaldesign101.com/wp-content/uploads/2010/10/LinkageSynthesis.jpg
180
763
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-10-17 19:14:562017-01-07 23:00:09Mathematica Notebook for Four-Bar Linkage Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2010/10/LinkageSynthesis.jpg
180
763
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2010-10-17 19:14:562017-01-07 23:00:09Mathematica Notebook for Four-Bar Linkage Synthesis https://mechanicaldesign101.com/wp-content/uploads/2009/07/Cam-Driven-Artist.jpg
423
817
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-26 00:35:522022-09-17 09:46:02Cam-driven artist mechanical toy
https://mechanicaldesign101.com/wp-content/uploads/2009/07/Cam-Driven-Artist.jpg
423
817
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-26 00:35:522022-09-17 09:46:02Cam-driven artist mechanical toy https://mechanicaldesign101.com/wp-content/uploads/2009/07/Delft-Models.jpg
642
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-20 17:08:532017-01-08 08:53:43Linkage models at TU-Delft
https://mechanicaldesign101.com/wp-content/uploads/2009/07/Delft-Models.jpg
642
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-20 17:08:532017-01-08 08:53:43Linkage models at TU-Delft https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-5cover.jpg
675
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-16 04:07:532017-01-08 08:59:28Elementary Robotics
https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-5cover.jpg
675
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-16 04:07:532017-01-08 08:59:28Elementary Robotics https://mechanicaldesign101.com/wp-content/uploads/2009/07/Intro-to-Mechanisms.jpg
412
1174
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-15 06:02:532017-01-08 09:08:32CMU’s Introduction to Mechanisms
https://mechanicaldesign101.com/wp-content/uploads/2009/07/Intro-to-Mechanisms.jpg
412
1174
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-15 06:02:532017-01-08 09:08:32CMU’s Introduction to Mechanisms https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-3cover.jpg
675
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-14 16:20:082017-01-08 09:11:21Four-bar linkage analysis: Slider-crank
https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-3cover.jpg
675
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-14 16:20:082017-01-08 09:11:21Four-bar linkage analysis: Slider-crank https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-2cover1.jpg
675
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-13 00:29:402017-01-08 09:16:08Four-bar linkage analysis: 4R quadrilateral
https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-2cover1.jpg
675
900
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-13 00:29:402017-01-08 09:16:08Four-bar linkage analysis: 4R quadrilateral https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-1cover.jpg
338
450
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-11 22:10:272017-01-08 09:19:29DC motor torque and power
https://mechanicaldesign101.com/wp-content/uploads/2009/07/McCarthyNotes-1cover.jpg
338
450
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-11 22:10:272017-01-08 09:19:29DC motor torque and power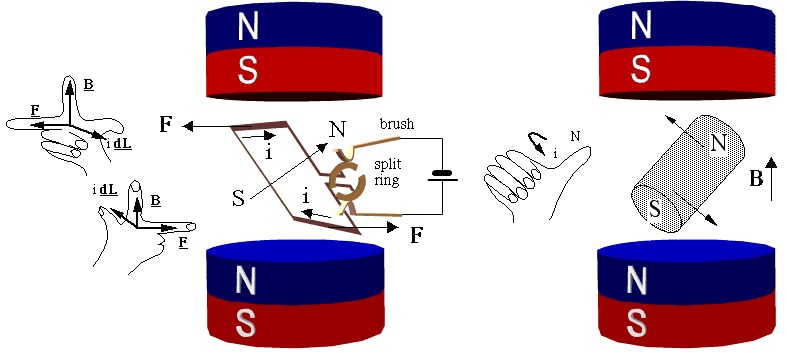 https://mechanicaldesign101.com/wp-content/uploads/2009/07/phyclips.jpg
353
787
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-11 21:49:362017-01-08 09:30:22DC motor basics
https://mechanicaldesign101.com/wp-content/uploads/2009/07/phyclips.jpg
353
787
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-11 21:49:362017-01-08 09:30:22DC motor basics https://mechanicaldesign101.com/wp-content/uploads/2009/07/brittonlecture.jpg
445
640
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-06 01:38:572017-01-08 09:35:23Geometric Dimensioning and Tolerancing
https://mechanicaldesign101.com/wp-content/uploads/2009/07/brittonlecture.jpg
445
640
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-07-06 01:38:572017-01-08 09:35:23Geometric Dimensioning and Tolerancing https://mechanicaldesign101.com/wp-content/uploads/2009/04/Chris-Sangwin.jpg
568
1274
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-27 04:21:452022-09-17 09:48:00C. J. Sangwin’s linkage movies
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Chris-Sangwin.jpg
568
1274
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-27 04:21:452022-09-17 09:48:00C. J. Sangwin’s linkage moviesHave a linkage design challenge? We can help.
 Contact us on this feedback form. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks.
Contact us on this feedback form. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks.
Linkage Synthesis Theory
The mathematical synthesis of linkage movement provides a powerful tool for invention. However, the specified task may not have useful solutions, and the search for successful tasks can be discouraging.
To address this, we automate the search and evaluation process within tolerance zones specified by the designer. These Mathematica notebooks implement our approach to finding defect-free four-bar linkage designs.
RR Constraint Synthesis for Function Generation

Synthesis of an RR Constraint
An important technique in kinematic synthesis is the design of an RR constraint that controls the movement of two joints of an existing serial chain. For a given RR serial chain, like OA shown above, we can specify its movement through five required task positions. This provides the information needed to design an RR constraint, GW above, that ensures the system moves through the required task positions.
This technique is called function generation in the kinematics synthesis literature, because the synthesized RR constraint maintains a specified relationship between the joint angles alpha and beta at joints O and A.

Select this link to download our Mathematica notebook: RR-Constraint Synthesis. It uses a given RR chain and the associated task to determine tolerance zones, where it searches for defect-free designs. As above, this file may download as text file so remove the .txt extension, then it should be readable by Mathematica. If you have any questions, please contact me.
Five-Position Synthesis of a Four-bar Linkage
Here we show a four-bar linkage designed to guide the coupler through five required task positions.
Please download and try our updated Mathematica notebook: Five-Position Synthesis. It searches in the vicinity of the required task for sets of positions that yield defect-free four-bar linkages. It may download as textfile so remove the .txt extension, then it should be readable by Mathematica.
The video below shows the operation of this notebook.
If you have any problems or advice, please contact me.