https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker
https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank WalkerLATEST BLOG POSTS
https://mechanicaldesign101.com/wp-content/uploads/2023/02/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-02-11 10:00:562023-02-11 10:00:56Ken’s Tank Walker https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-21 14:24:032023-01-21 14:24:03Ken’s Perry Walker https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators
https://mechanicaldesign101.com/wp-content/uploads/2023/01/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-04 17:04:492023-01-04 17:04:49A Walking Robot with Four Legs and Two Actuators https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-03 14:06:292023-01-03 14:06:29Fall 2022 MAE 245 Halloween Robots https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:13:452023-01-01 14:14:06Kinematics Lecture: Curvature Theory and Walking Robots https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 14:02:022023-09-16 13:21:25Kinematics Lecture: Design of a Linkage System to Draw a Curve https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 13:47:252023-01-01 13:47:25Kinematics Lecture: Six-bar and Eight-bar Linkage Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2023/01/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2023-01-01 13:47:252023-01-01 13:47:25Kinematics Lecture: Six-bar and Eight-bar Linkage Synthesis https://mechanicaldesign101.com/wp-content/uploads/2021/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-12-03 16:13:322022-09-17 09:25:53Fall 2021 Mechanical Walker Designs
https://mechanicaldesign101.com/wp-content/uploads/2021/12/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-12-03 16:13:322022-09-17 09:25:53Fall 2021 Mechanical Walker Designs https://mechanicaldesign101.com/wp-content/uploads/2016/06/MechGenSP-ipad-1.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-10-28 09:30:282021-12-03 15:50:54MechGen Software Privacy Policy
https://mechanicaldesign101.com/wp-content/uploads/2016/06/MechGenSP-ipad-1.jpg
300
300
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-10-28 09:30:282021-12-03 15:50:54MechGen Software Privacy Policy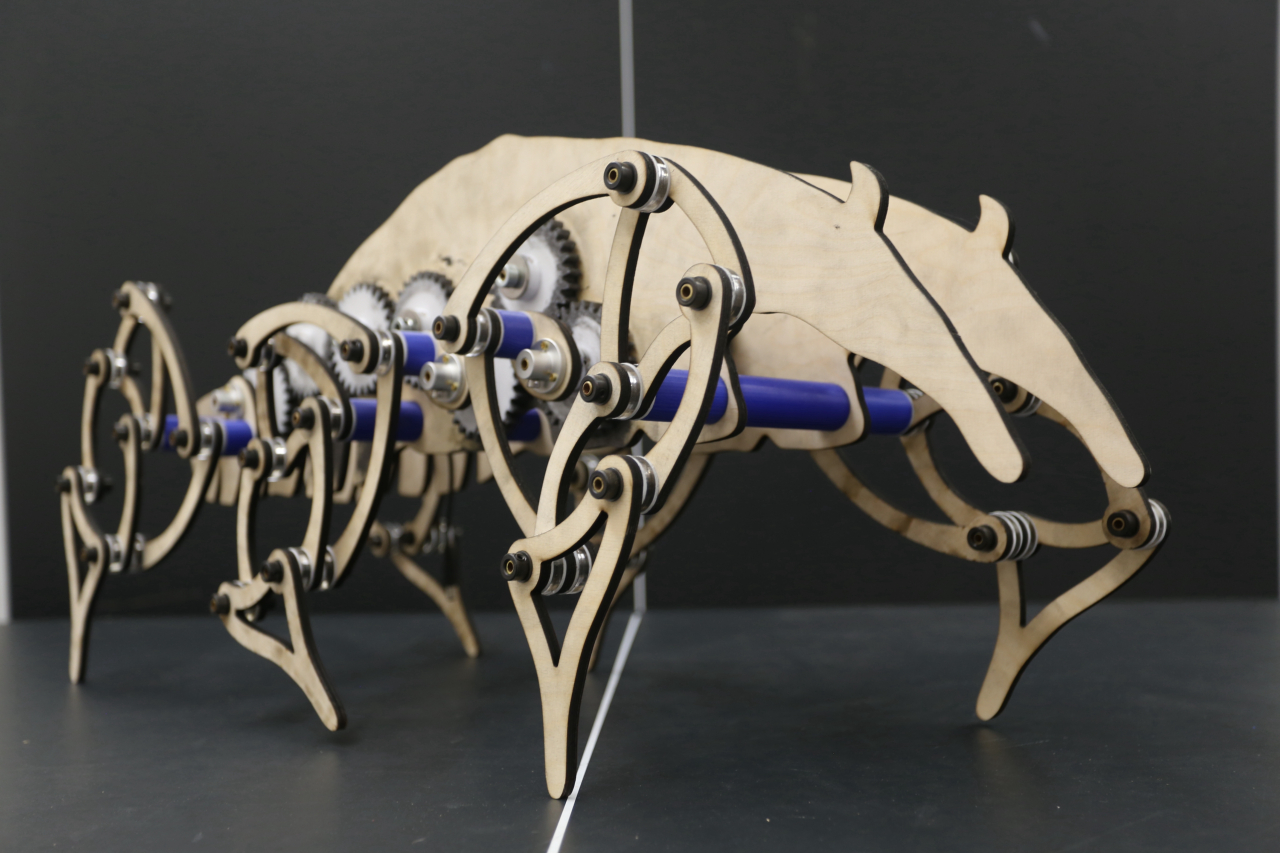 MDA
https://mechanicaldesign101.com/wp-content/uploads/2021/09/Anteater-Walker-pdf.jpg
853
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-09-17 16:13:462021-09-17 16:36:20Design of Mechanical Walking Robots
MDA
https://mechanicaldesign101.com/wp-content/uploads/2021/09/Anteater-Walker-pdf.jpg
853
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2021-09-17 16:13:462021-09-17 16:36:20Design of Mechanical Walking Robots MDA
MDA



 MDA
MDA