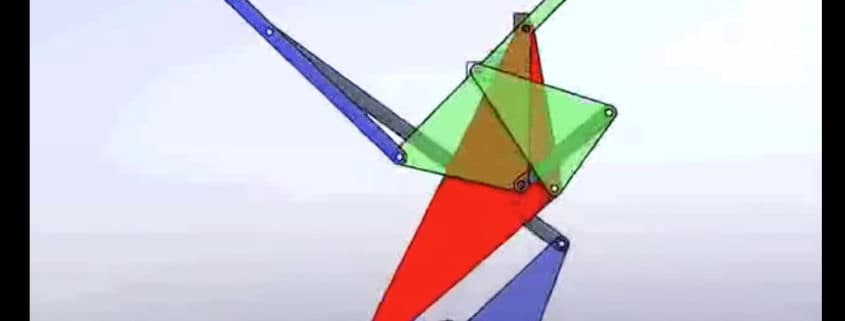
Mondo Spider walking machine
This walking machine is known as the Mondo Spider. More information is available at Mondospider.com.
The leg of the mondo spider has the topology known as a Stephenson six-bar and is described in US Patent 6,260,862 awarded to Joseph Klann. Access it through the link:
https://patents.google.com/patent/US6260862B1/en
Wikipedia calls this the Klann linkage which is described here:
http://en.wikipedia.org/wiki/Klann_Linkage