UCI, Vital Link and Orange County high schools and colleges are working together to organize a Rescue Robotics event in May of 2015. The Rescue Robotics challenge provides an opportunity for students in information and communication technology programs across Orange County to test their skills using ground and aerial robots to find and identify simulated human survivors.
Rescue Robotics Challenge Details
The Rescue Robotics competition has three main principles, each of which imposes difficult challenges on the student team which are important for the real world application of this kind of robot.
1 – Each robot must be safely autonomous. In other words, the robot needs to be programmed to do the work of finding survivors on its own without help from the student team. This is an important need if robots are to help us search disaster areas.
2 – The robot must work in the natural environment on uneven terrain, with variable sunlight and wind. This is a challenge for most robot sensors, but important in a real disaster situation.
3 – The teams are allowed to use up to five robots which can be either ground or aerial robots. More robots makes it easier to find survivors, but increases complexity of programming the communication and coordination of the search.
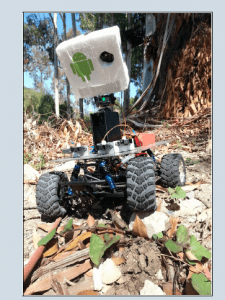
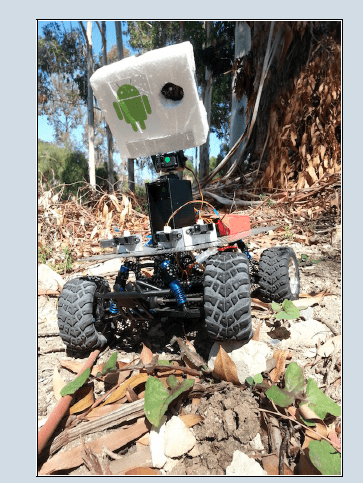
A speedy six-wheeled search robot that uses an Android phone as its processor.
Rescue Robotics Workshop
At a recent Rescue Robotics Workshop teachers from across Orange County learned to build and program ground robots that use an Android phone as the processor and sensor system. They also learned how to build a quadcopter with an Arduino processor to search from the air.

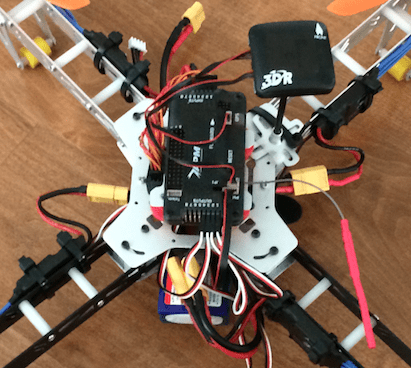
The quadcopter is a small and reliable aerial search robot.
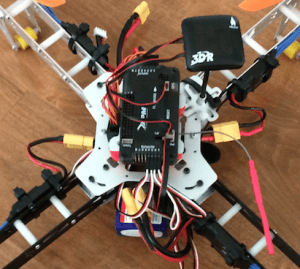 Close-up on Arduino microprocessor apparatus on aerial robot.
Close-up on Arduino microprocessor apparatus on aerial robot.
Rescue Robotics is a project based learning program which is an extension of the Performance Engineering Program in the Department of Mechanical and Aerospace engineering at UCI, in which UCI students learn racecar engineering, build a racecar, and put it in competition against other schools. The goal of both these classes is for students to learn engineering project skills and either take them to college or directly to industry.
Just like in UCI’s Racecar Engineering class, students create a useful product, which is just another goal of this educational program. The crucial difference between the two classes is that Rescue Robotics is focused on information and communication technology rather than engineering and manufacturing. Clearly the class involves engineering and manufacturing, but the spotlight is really on finding an effective and interesting way to teach students computer programming skills with real world application. An overarching goal of this program is to strengthen industry in Orange County by enrolling 17,000 Orange County students in healthcare, engineering, and information technology career paths by 2017-18.
Freshman Project: Quadcopters
The Rescue Robotics program has strong connections to the UCI Freshman Project course Engr 7, where Learning by doing in a competitive team environment has been proven to be an engaging, exciting, and effective way to teach engineering to students. Classes like this open up career and educational paths for students starting from a young age.
UCI’s freshman project class, Engineering 7, organized by Lily Wu, has over 200 new students building quadcopters. The two videos below show some of their work.
Read more
More about Rescue Robotics can be found at the Design News Blog.