
CSULA FSAE to compete at the 2013 Energy Invitational
CSULA FSAE race car
The California State University Los Angeles Formula SAE race team will compete at the 2013 Energy Invitational on May 11, 2013

CSULA FSAE race car
The California State University Los Angeles Formula SAE race team will compete at the 2013 Energy Invitational on May 11, 2013


2013 UC Davis raceteam
UC Davis racecar
The UC Davis race team will compete at the 2013 Energy Invitational at Adams Motorsports Park on Saturday, May 11, 2013.

2013 UCI race team
2013 UCI race team with Zeta, our entry for the 2013 FSAE Electric, which is under construction. There is work to do but the goal is to debut this racecar at the 2013 Energy Invitational on May 13, 2013.
2013 Energy Invitational Medal
This is the medal for our 2013 Energy Invitational, which gets underway at 8:00am Saturday, May 11, 2013 at Adams Motorsports Park.

Saturday, May 5, UCI hosted seven local high school race teams to test their cars for the Energy Invitational. It was impressive to see the quality of their work and the variety of their designs. Select this link to see photographs of the event on Facebook.
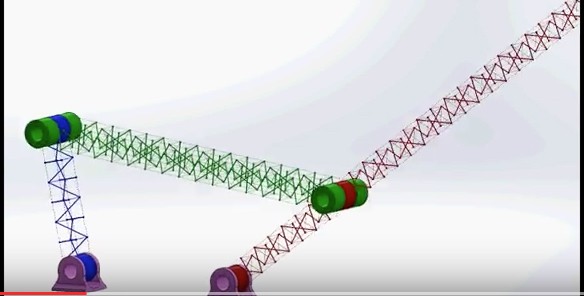
This is a design concept that uses tensegrity beam elements as the bars of a large-scale linkage system for use in deployable structures for disaster relief. This animation is by Mark Plecnik.

This animation shows the W16 Bugatti Veyron engine with four cam-shafts actuating 64 valves, four on each of sixteen cylinders.
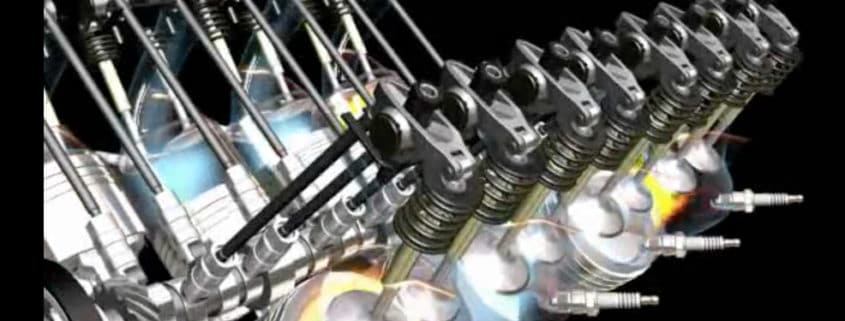
This animation shows the operation of the cam shaft, lifters and valves in a V8 engine.

This animation shows the part by part assembly of a four cylinder diesel engine.

The web-site AnimatedEngines.com provides animations of a variety of engines that provide insight to their operation
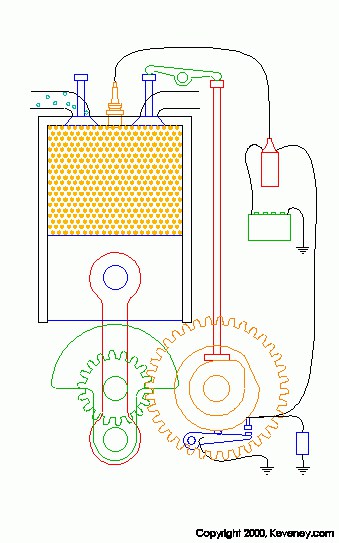
Otto cycle animation