

Six-bar linkage with rectilinear moving link
This is an animation of a Watt I six-bar linkage with a translating link that does not rotate (select the video to begin the animation). This is obtained using GeoGebra to execute a construction described by E. A. Dijksman in his book Motion Geometry of Mechanisms.
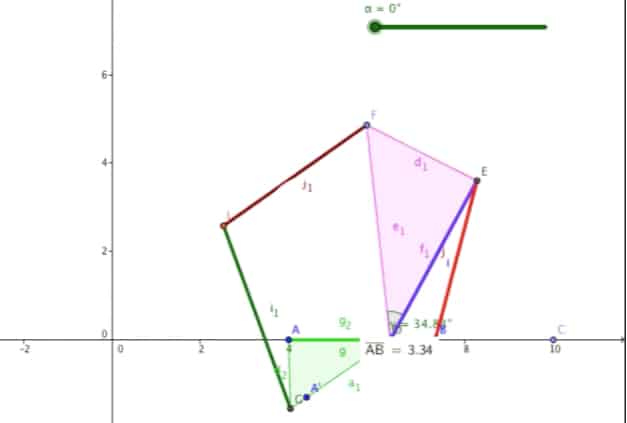
Rectilinear Linkage








Leave a Reply
Want to join the discussion?Feel free to contribute!