Our trip through China concluded at a conference and workshop at Changzhou University. This video highlights the Changzhou conference on innovation in Robotics and Intelligent Manufacturing, the beauty of the city of Changzhou, and a rainy night in Shanghai.
https://mechanicaldesign101.com/wp-content/uploads/2017/03/Design-Research-Changzhou-1.jpg7271300Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2017-03-12 23:32:312017-04-14 13:41:56Design Research in China: Changzhou
This is the third of five videos highlighting design research across China. This captures the beauty of Dalian, a city on the Yellow sea, and the excellent research in precision machine design by colleagues and their students at Dalian University of Technology.
https://mechanicaldesign101.com/wp-content/uploads/2016/12/Dalian-1.jpg8911600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-12-31 09:39:452017-04-14 13:45:40Design Research in China: Dalian
This video of our visit to Xi’an captures the beauty of the city and its surroundings, as well as the personality of the excellent professors and students at Xidian University.
https://mechanicaldesign101.com/wp-content/uploads/2016/12/Design-Research-Xian-1.jpg8991600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-12-13 09:45:202017-04-14 13:46:08Design Research in China: Xi’an
Yang Liu and Peter Yang designed and built this physical prototype of our Trifolium mechanism. It is fabricated from ABS using the Stratasys Fortus system in UCI’s Institute for Design and Manufacturing Innovation.
https://mechanicaldesign101.com/wp-content/uploads/2016/12/IMG_6685.jpg10671600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-12-13 08:12:302017-04-14 13:46:32Prototype of the Trifolium Mechanism
Chris McCarthy filmed and edited this video of our visit to Tianjin, which showcases the design research in mechanisms and robotics at Tianjin University and captures the energy and beauty of the city and its people.
https://mechanicaldesign101.com/wp-content/uploads/2016/11/Design-Research-Tianjin.jpg5841042Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-11-24 11:55:482017-04-14 13:47:34Design Research in China: Tianjin
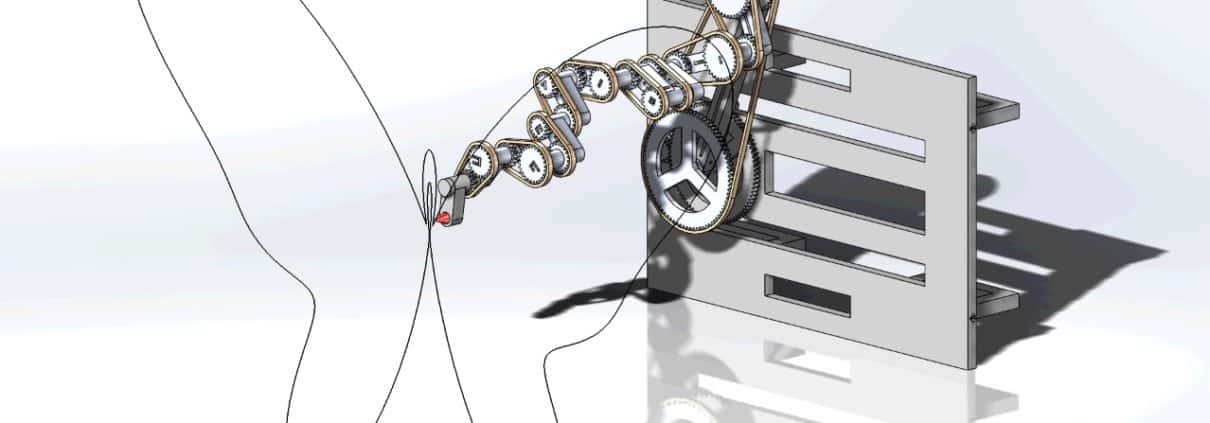
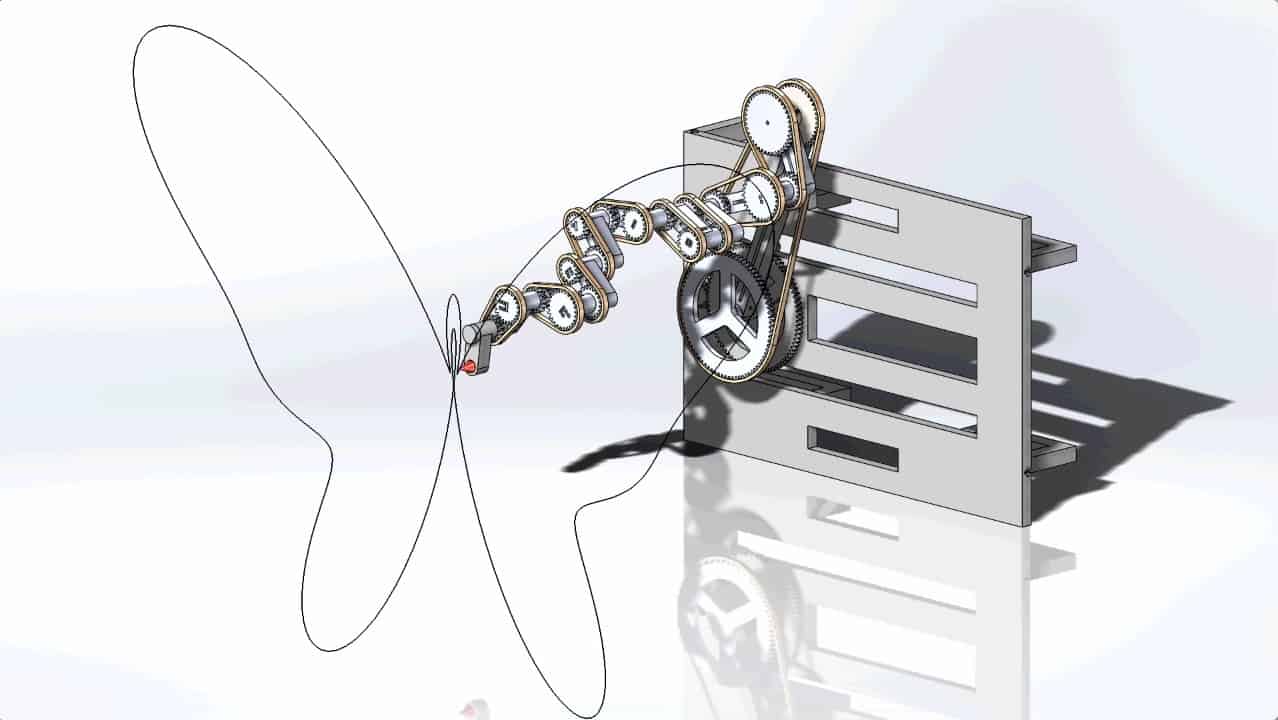
This animation is taken from Yang Liu’s detailed design drawings for the manufacturing prototype of the Butterfly Linkage. The component parts are to be constructed by additive manufacturing.
This animation includes the music of Explosions in the Sky:
https://mechanicaldesign101.com/wp-content/uploads/2016/11/Prototype-Butterfly-Linkage.jpg7201278Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-11-23 21:55:572017-04-14 13:47:53Manufacturing Prototype for the Butterfly Linkage
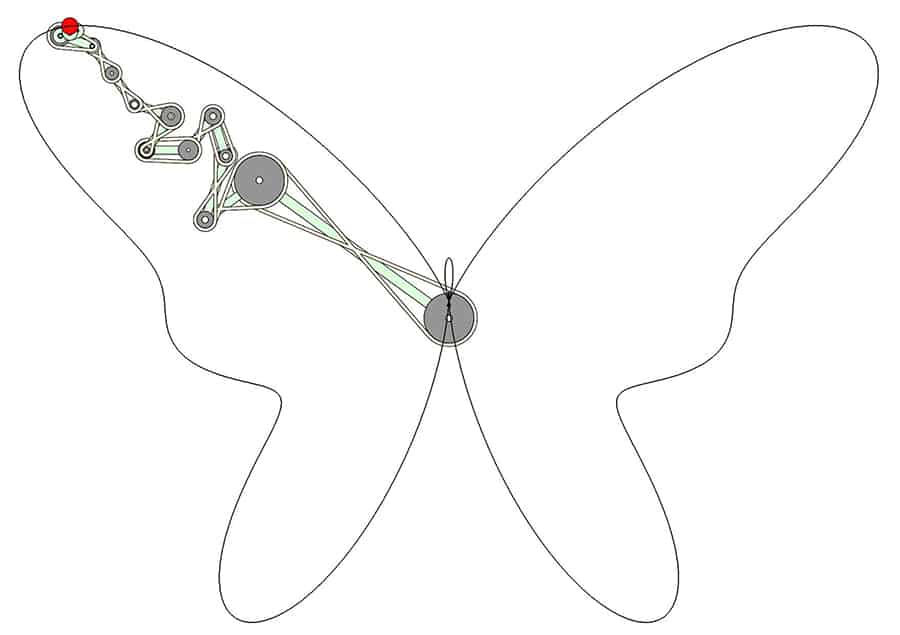
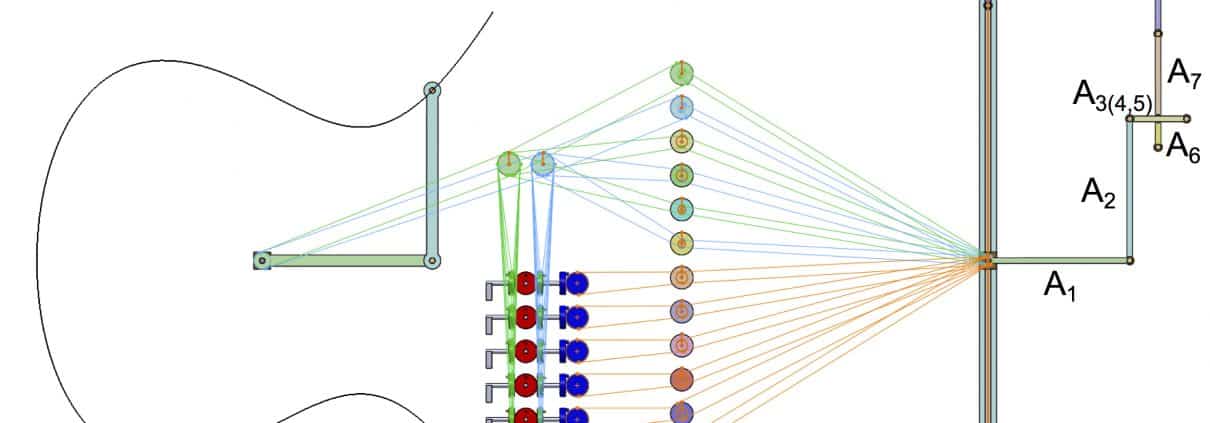
Mechanical systems that draw trigonometric curves provide a versatile way to draw complex curves. Yang Liu designed this serial chain consisting of 14 links coupled by a belt drive to draw the Butterfly curve.
A coupled serial chain. Without going into too much detail, it is possible to use the coefficients ak , bk, ck and dk to define the link dimensions,
Link dimensions
and the initial angles,
Initial angles
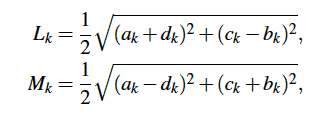
These parameters allow us to redefine the trigonometric equations of the curve as the coordinate equations of the links of a serial chain,
Serial chain equations
This equation identifies the curve as the end of a serial chain consisting of a sequence of links L1, M1, L2, M2 and so on, such that the Lk links rotate counter clockwise and the Mk links rotate clockwise both at the rate $latex k\theta$.
The initial angles define the configuration of the serial chain when $latex \theta=0$.
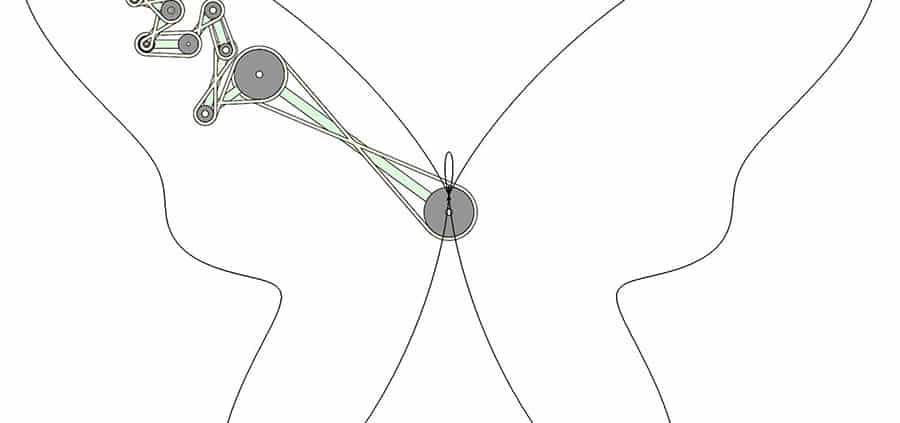
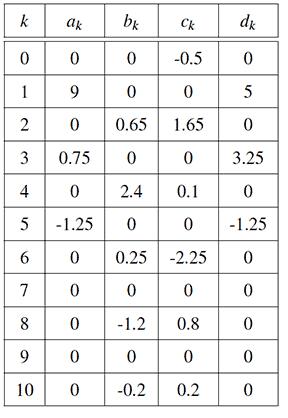
The Butterfly drawing mechanism. The trigonometric curve of the Butterfly linkage is defined by the coefficients in the following table,
Table of Butterfly coefficients
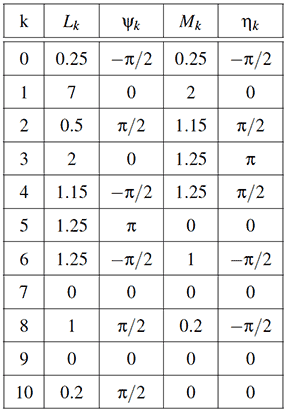
These coefficients are used to calculate the dimensions and initial configuration of the serial chain listed in the following table,
Table of Butterfly link dimensions
The result is a serial chain consisting of 14 links that are coordinated to move together as the base rotates. The end-point of the chain draws the Butterfly curve.
Butterfly drawing mechanism
https://mechanicaldesign101.com/wp-content/uploads/2016/10/ButterflyMech2.jpg635900Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-10-20 18:06:162022-07-08 19:36:01Design of Drawing Mechanisms
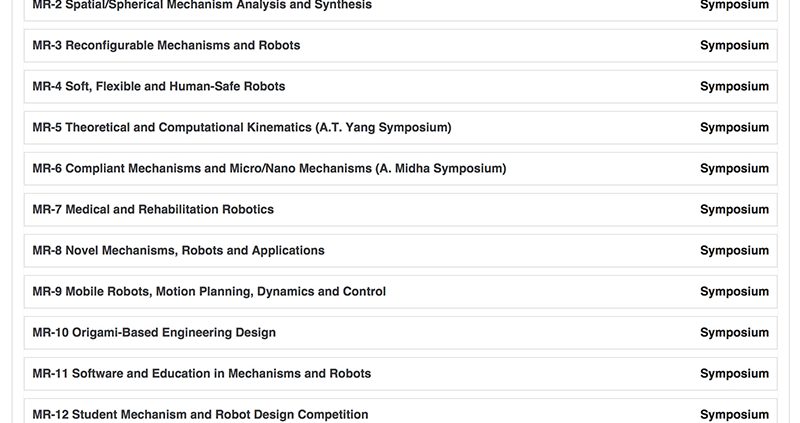
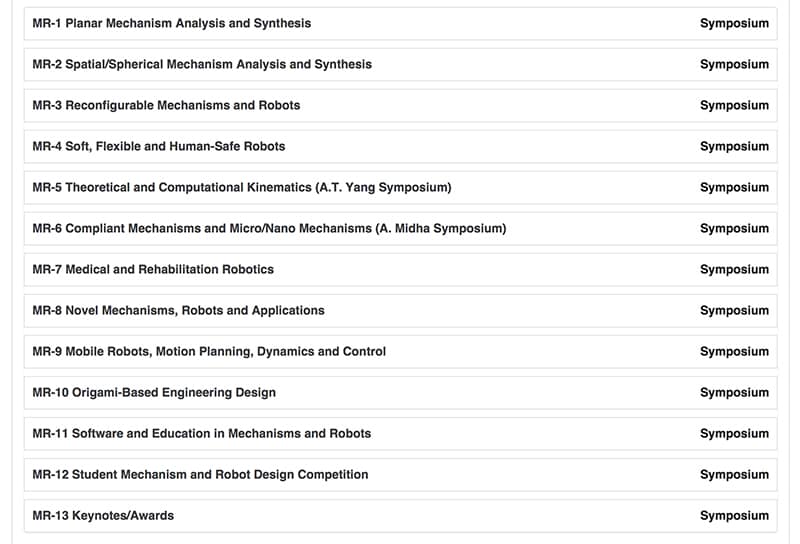
Symposia organized for the 2016 Mechanisms and Robotics Conference
The 2016 Mechanisms and Robotics conference is part of International Design Engineering Technical Conferences organized by ASME International in Charlotte, North Caroline, August 22-24.
For some reason, ASME has broken these links to the 2016 IDETC conference, but you can find out more about each of the symposia at the conference overview link: 2016 ASME Mechanism and Robotics Conference Overview. Then select the Expand all Symposia Link to see the sessions and a list of papers.
MotionGen is a planar four-bar linkage simulation and synthesis app that helps users synthesize planar four-bar linkages by assembling two of the planar RR-, RP- and PR-dyad types, (R refers to a revolute or hinged joint and P refers to a prismatic or sliding joint).
The input task is a planar motion given as a set of discrete positions and orientations and the app computes type and dimensions of synthesized planar four-bar linkages, where their coupler interpolates through the given poses either exactly or approximately while minimizing an algebraic fitting error. The algorithm implemented in the app extracts the geometric constraints (circular, fixed-line or line-tangent-to-a-circle) implicit in a given motion and matches them with corresponding mechanical dyad types enumerated earlier. In the process, the dimensions of the dyads are also computed. By picking two dyads at a time, a planar four-bar linkage is formed. Due to the degree of polynomial system created in the solution, up to a total of six four-bar linkages can be computed for a given motion.
MotionGen display
MotionGen also lets users simulate planar four-bar linkages by assembling the constraints of planar dyads on a blank- or image-overlaid screen. This constraint-based simulation approach mirrors the synthesis approach and allows users to input simple geometric features (circles and lines) for assembly and animation. As an example of the Simulation capabilities of the app, Figure shows a walking robot driven by two sets of planar four-bar linkages where the foot approximately traces a trajectory of walking motion. The users can input two dyads on top of an imported image of a robot or machine to verify the motion and make interactive changes to the trajectories.
Anurag Purwar describes MotionGen and its applications in this video:
This is Yang Liu’s design of a mechanical system that draws an elliptic cubic curve.
Here is how it is done.
Algebraic curve. An algebraic curve is the set of points P=(x, y) with coordinates that satisfy an algebraic equation,
Algebraic curve
where ui and vi are integer exponents, and ci are real coefficients.
Forward kinematics. In order to draw this curve, we use an RR serial chain shown in Figure 1. All that is needed is to coordinate the angles of this chain so its end-point P traces the curve.
Figure 1. The joints of an RR serial chain are coordinated to guide the point P along a specified curve.
The relationship between the joint angles and the coordinates P=(x, y) is given by the forward kinematics equations of this RR chain,
RR forward kinematics
Kempe’s formula. In his 1876 paper, “On a general method of describing plane curvesof nth degree by linkwork,” A. B. Kempe substituted this into the equation of the curve and simplified the result to obtain,
Kempe formula
Kempe interpreted this formula to be the x-coordinate of an N link serial chain, where each link has the length Aj and is positioned at the angle,
Kempe link angles
The end-point of Kempe’s serial chain maintains the value x=C, which means it only moves along the y-direction.
Mechanical computation. Now connect cable drives to the two joints of the RR chain so they can be used as inputs to N mechanical computers that calculate the Psij angular values. The output of the mechanical computers are connected by cable drives to the joints of Kempe’s serial chain.
The operations needed in the mechanical computers are simply multiplication and addition. Multiplication of an angle by a given factor is achieved by using a cable drive with the ratio of the pulley sizes set to the specified factor. The sum of two angular values is achieved using a bevel gear differential.
The result is a mechanical system that constrains the angles of an RR chain so it draws the specified algebraic curve within the workspace of RR serial chain.
Elliptic cubic curve. As an example, consider the elliptic cubic curve,
Elliptic cubic curve
Let the RR chain have link lengths L1=L2=1, and obtain Kempe’s formula for this curve,
Elliptic cubic formula
This equation has 12 terms, so Kempe’s serial chain has 12 links. The 12 mechanical computers connecting the angles of Kempes serial chain to the driving joints for the RR chain, include six additions and eight multiplications, Figure 2.
Figure 2. The Kempe’s serial chain and the mechanical computations that constrain the RR serial chain to draw an elliptic cubic curve.
Rather than use differentials and cable drives, Kempe used linkages to perform the mechanical computations and couple the results. The outcome is a lot of links as can be seen in this animation provided by Alex Kobel.
https://mechanicaldesign101.com/wp-content/uploads/2016/08/Elliptic-M5.jpg8101600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2016-08-03 16:34:322017-04-14 13:51:14Mechanical computation and algebraic curves