
Six-bar flower
Tim Rasmussen designed this six-bar linkage to guide the petals of this flower.

Tim Rasmussen designed this six-bar linkage to guide the petals of this flower.

Mohamed Ali designed this six-bar linkage to guide the wings of a butterfly.

Mohamed Ali prepared this video of the four-bar linkage he designed with MechGen to guide the pedals of this flower.

Cameron Turner prepared this video of his four-bar linkage flower. At the end he shows the four-bar linkage that drives the pedals.

This is the first assignment in my graduate mechanism synthesis class. It is supposed to be a flower with petals that open and close guided by a four-bar linkage. I did not realize that the shape I gave them for the petals would look so scary, but maybe it is appropriate for Halloween. This design was developed by Hsuan-Chen Wan.

This is an example of a shape-morphing linkage resulting from the research collaboration James Schmiedeler and Andrew Murray. This is an old design dating to when James was a Professor at Ohio State University. He is now at Notre Dame. Andrew Murray is a Professor at the University of Dayton.
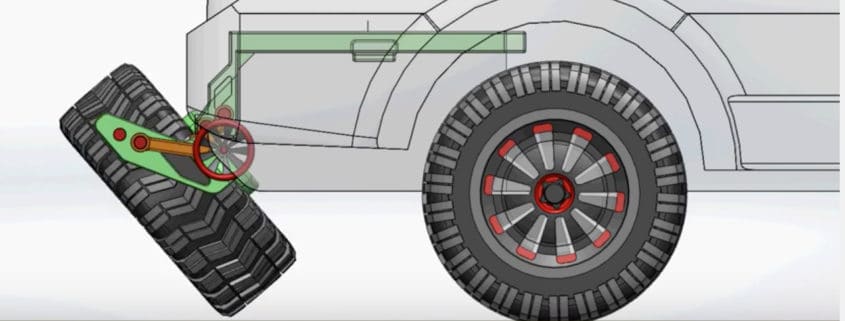
This four-bar linkage was designed by Kaustubh Sonawale using MechGen to deploy the spare tire of a pickup truck.
Please join us on May 11, 2013 for the UCI Energy Invitational.

21st Century Kinematics
The NSF Workshop on 21st Century Kinematics at the 2012 ASME IDETC Conference in Chicago, IL on August 11-12, 2012 consisted of a series of presentations and a book of supporting material prepared by the workshop contributors.
The book is now available at amazon.com: 21st Century Kinematics–The 2012 NSF Workshop.
And here are the seven primary presentations given at the workshop.
Colleagues joined in with two additional presentations:
Many thanks to the contributors and the attendees for an outstanding workshop.
Here is the schedule for the IDETC/NSF Workshop on 21st Century Kinematics:
Workshop Schedule: 21st Century Kinematics