The server in our UCI Robotics and Automation Laboratory has been revived (thank you Kaustubh). This means the links to course notes and to Mathematica notebooks have been reestablished. Synthetica.eng.uci.edu now links to my web-page which needs work. A laboratory page that will replace this soon.
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png00Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2014-07-27 17:50:402017-04-14 14:34:14Mechanism and Robotics Notes
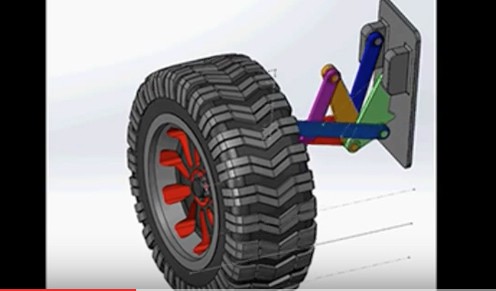
This animation was prepared by Yang Liu for a linkage designed by Kaustubh Sonawale. The eight-bar linkage guides the platform in the approximation to rectilinear motion.
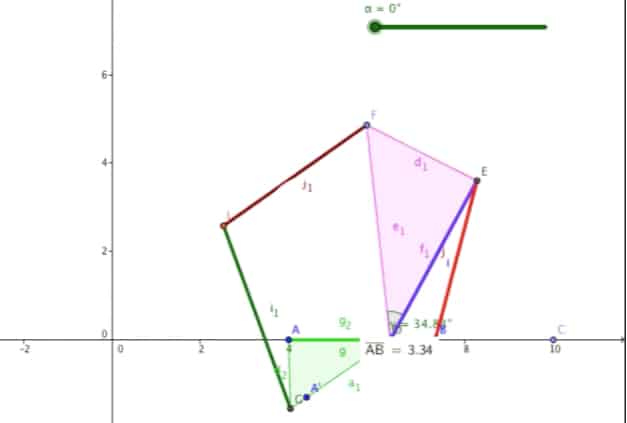
This is an animation of a Watt I six-bar linkage with a translating link that does not rotate (select the video to begin the animation). This is obtained using GeoGebra to execute a construction described by E. A. Dijksman in his book Motion Geometry of Mechanisms.
Rectilinear Linkage
https://mechanicaldesign101.com/wp-content/uploads/2014/01/Rectilinear-Link.jpg358647Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2014-01-20 23:15:042017-04-14 14:37:08Six-bar linkage with rectilinear moving link
https://mechanicaldesign101.com/wp-content/uploads/2013/10/California-Challenge-Tustin.jpg5801109Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2013-10-28 18:55:592022-07-08 19:32:12KOCE reports on the California Challenge
https://mechanicaldesign101.com/wp-content/uploads/2013/10/Kinematics-and-Polynomials.jpg6621299Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2013-10-23 18:11:302017-04-14 14:40:45Kinematics and Polynomials–available on a Mac
Some of the cars being prepared for the California Challenge on Saturday, October 5, 2013 at the Orange County Great Park.
https://mechanicaldesign101.com/wp-content/uploads/2013/10/California-Challenge-Test-Day.jpg434835Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2013-10-01 14:35:162017-07-19 14:43:09Preparing for the California Challenge
Disney Research guides two degree-of-freedom open chains using the coupler curve of a geared five-bar linkage to obtain geared seven-bar and nine-bar linkages, which they use to move the front and rear legs of their Cyber Tiger. By connecting the driving gears of the four legs, they obtain a one degree-of-freedom system that animates the Cyber Tiger.
The computational design system uses an optimization routine to adjust the coupler curve of the five-bar linkage to approximate a given curve in order to guide the system in a desired movement. The results are terrific, and look a lot like the mechanical toys of the past. Select this link for more information.
Inside Irvine has an article about the 2013 Solar Decathlon and XPO at the Orange County Great Park. Select this link to access the on-line magazine. See page 5 for descriptions of each of the 20 Universities competing in this event.
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png00Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2013-08-09 10:43:422013-08-09 10:43:422013 Solar Decathlon