MDA
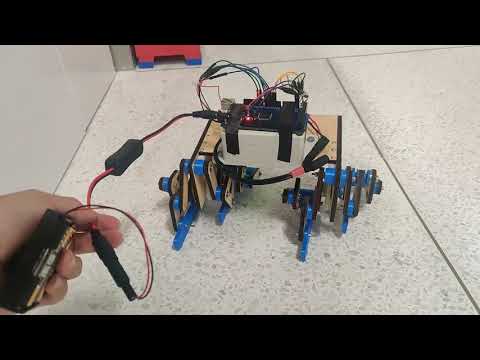
MDAGNK Steerable Robot Walker
This walking robot was designed and built by Tom Nguyen, Jonathan Chavez, Connor Linklater and Jonathan Lu. It follows Chenhao’s design but uses stepper motors instead of DC servo motors. The chassis design was inspired by the GNK power droids of Star Wars. The legs are pairs of six-bar rectilinear mechanisms that are 180 degrees out of phase. Each pair of legs is driven by a stepper motor. It is controlled through Blue Tooth using an iPhone application.