Austin Suh has designed a variety of spherical linkages that provide a unique movement to open a jewelry box. Here are some examples, one of which has a linear actuator to open the box at the touch of a switch.
https://mechanicaldesign101.com/wp-content/uploads/2025/01/Jewelry-Boxes.jpg8961600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2025-01-03 16:23:482025-01-03 16:23:51Spherical Linkage Opening a Jewelry Box
This trimaran designed by Jiaji Li has three oars supported by spherical four-bar linkages on each side. A motor on each side drives the set of three oars, and the relative speed of the motors steers the trimaran. The result is a robot that swims.
Please take a look at the videos demonstrating these Robot Walkers. Our study of minimal actuation for walking robots has lead to pairs of specialized leg mechanisms at each of four corners of the walker, eight in all. The robot is steerable with two separate drive motors, that is each side has four leg mechanisms connected through a gear train to a motor. This is a lot of moving parts, but the result is remarkable.
All of these robot walkers respond to commands from an infra-red remote control. They can go forward and backwards, speed up and slow down, turn right and left, and even spin in place.
It was a pleasure working with students on these projects. Their creativity and enthusiasm is fun to be around.
Stegosaurus Walker: This first video shows the Stegosaurus Walker designed and built by the team of Cristian Albrektsen, Itzel Montoya, Matthew Reber, John Williams, and Megan Yang. Select this link or the image.
The Grinch Walker: This second walker captures the Grinch Who Stole Christmas at the moment he brings the toys back to Whoville. It was designed and built by Melissa Lepe, Esteban Ruiz, Sebastian Petcu, Purushotham Verma and Jasper Yao. Select this link or theimage.
Tio de Nadal Walker: The third walker celebrates a Catalan tradition known as the Tio de Nadal, which is a magical log that delivers presents and warms the family. It was designed and built by Paula Simo, Lois Meira, Eudald Sangenis, and Marc Quiroga. Select this link or the image.
https://mechanicaldesign101.com/wp-content/uploads/2023/12/a-Stegosaurus.jpeg10731600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-12-19 07:38:292023-12-19 07:38:33Eight Legs, Two Motors and a Lot of Personality
Jiaji Li has succeeded in building a prototype Robotic Rowboat. I have used 3D printing technology ever since it was introduced decades ago to build spatial mechanisms and routinely failed, which is why this is a particularly satisfying outcome.
He convinced me to buy an inexpensive 3D printer and said he was sure PLA (poly lactic acid) would provide a strong but light-weight product. So I gave it a chance and find the result to be very nice.
This Eight-Legged Walker with two stepper motor drives controlled using a Bluetooth interface developed by Ruiqi Mao for his 2023 UCInspire project builds on work by Chenhao Liu, Jiaji Li and Ken Nguyen, and my senior project team of Tom Nguyen, Jonathan Chavez, Connor Linklater and Jonathan Lu.
Chenhao Liu was a 2022 UCInspire fellow who was in Covid lock down in China while he worked on his four-legged walker driven by DC motors and a bluetooth controller with Jiaji Li, a UCI PhD student.
Ken Nguyen developed both four-legged and eight-legged walkers using DC motor drives and infrared controllers. His early work has inspired much of what has followed.
The following videos show:
1. Ruiqi’s Summer 2023 eight-legged Panda walker which uses two stepper motors and a bluetooth interface,
2. The Winter 2023 four-legged GNK Walker which used two stepper motors and a bluetooth interface by my senior project team of Tom Nguyen, Jonathan Chavez, Connor Linklater and Jonathan Lu.
3. Chenhao’s Summer 2022 four-legged walker with two DC motor actuators and a bluetooth interface, and
4. Ken’s Winter 2022 eight-legged tank walker which uses two DC motors and an infrared controller.
Ruiqi’s Eight-legged Panda Walker (Summer 2023)
2. Four-legged GNK Walker (Winter 2023)
3. Chenhao’s Four-legged Walker (Summer 2022)
4. Ken’s Eight-legged Tank Walker (Winter 2022)
https://mechanicaldesign101.com/wp-content/uploads/2023/09/Ruiqi-Walker.png6621600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-09-04 17:27:572023-09-04 20:18:14Ruiqi Mao’s Panda Walker
The Vehicle Performance Engineering Lab is clean and ready for the return of students in the coming weeks. This sequence of videos introduce 1. the vehicles in the lab, 2. a close up of Rogue, and 3. a close up of our EV Prototype.
Introduction to the UCI Racecar Engineering Lab
Here are our current mini-baja, ice and EV race cars, which are the foundation for our vehicles for 2024. Many thanks to our sponsors, particularly Chris McMurray.
Close up of Rogue our mini-Baja racecar
This is a close up of Rogue, our mini-Baja vehicle that competed in Oregon in 2023. This vehicle will be the foundation for our 2024 design. Please help us out at http://Zotfunder.give.uci.edu/racing
Close up of our EV Prototype
This is a close up view of our EV Prototype. It is the foundation for the design of our 2024 EV competition vehicle. Please help us at https://Zotfunder.give.uci.edu/racing
https://mechanicaldesign101.com/wp-content/uploads/2023/09/Chris-McMurray.png6921658Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-09-01 11:30:242023-09-01 11:30:28UCI Ready for Racecar Engineering Season
Universities across Southern California start soon, and Engineering teams will begin the design and fabrication of their race cars for the the SAE Formula ICE and EV and the SAE Baja 2024 intercollegiate competitions. These student race teams need the support of their alumni, so please contact your home team and find a way to help.
UCI Alums and Friends: Our young UCI engineers were kept out of the Racecar lab for too long because of Covid. They are back and committed to demonstrating the high quality of UCI Engineering at the SAE intercollegiate competitions. And we need your help.
If UCI racecar engineering has impacted you in any way, or if you are passionate about our racecars and competition, I hope you’ll join the community of alumni and friends who support UCI Racecar Engineering by donating to https://zotfunder.give.uci.edu/racing.
Registration fees are due in October and we need running cars by March 2024. Here is the breakdown of costs:
Registration fees for the SAE EV and Baja competitions: $5,000 Kohler CH440 engine: $1,200 Subsystem Costs for Baja vehicle: $11,000 Subsystem Costs for EV vehicle: $15,000
It is easy to see that this $35,000 campaign is just a beginning. Additional funds such as costs for travel to the competitions, are not included in the campaign total so I hope I can count on your support today and for years to come. Please contribute in whatever way you can. The impact of your support is immeasurable!
This Spring quarter 60 students divided into 15 teams to design and build robot walkers. Two stepper motors drive a set of legs on each side. These legs are formed from a pair of six-bar linkages that provide coordinated rectilinear movement of two feet on each side providing stable legged locomotion.
I am always amazed by the creativity of the students in the design of the personalities of these walkers.
The ribbons and medals decorate the walkers with the three best times through our autocross course.
This video presents the mechanical walker prototypes designed and constructed by the students in my Kinematic Synthesis of Mechanisms class. They design and simulate the leg mechanism using Geogebra, then use SolidWorks to generate a details digital model and simulate its movement. Next they build and actuate two legs to test the motor drive and electronics. Finally, they assemble the complete walker and test it.
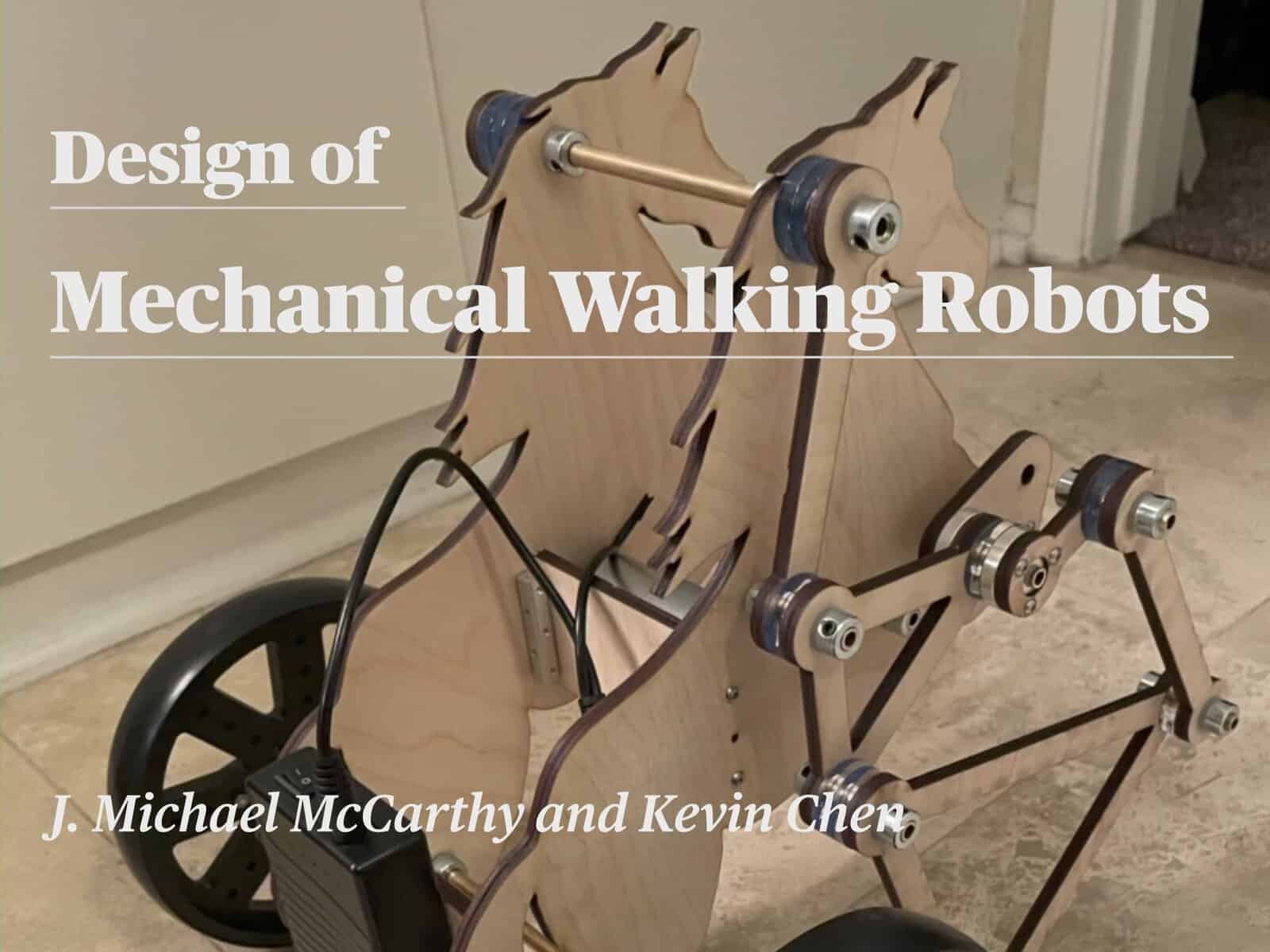
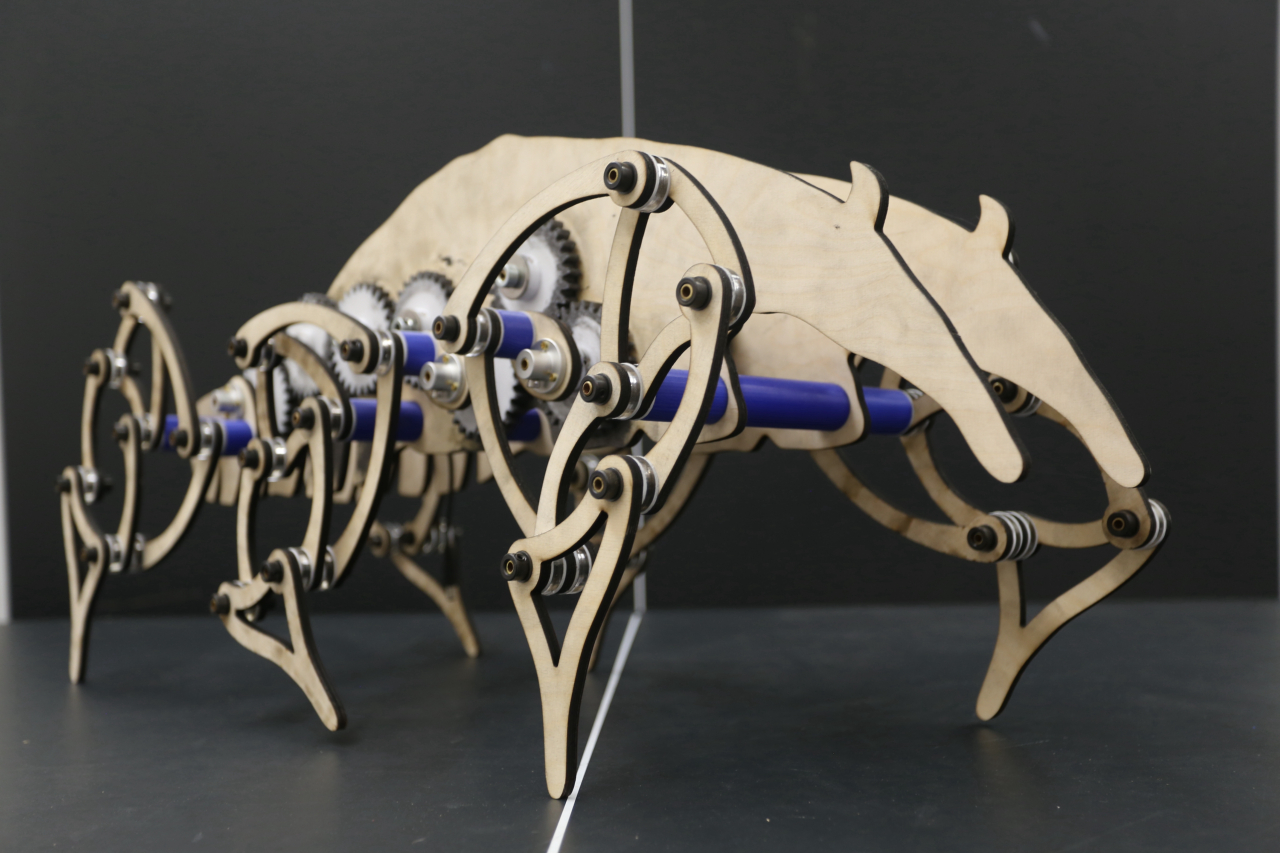
In this book, we present the detailed design of mechanical walking robots that are driven by a single motor. These walkers rely on specially designed leg mechanisms coordinated by gear trains in order to walk, rather than multiple computer controlled motors per leg. The result is a simplified walking robot that provides a platform for other mechanical and electronic functions.
Two, four and six legged walkers are presented that implement different types of leg mechanisms and power trains. In each case, we provide drawings for a laser cut wood or acrylic chassis, 3D printed parts and a complete parts list. Several of the designs implement an additional motor for steering as well as electronic components and software for speed control.
Our goal is to provide enthusiasts of all backgrounds what they need to build a walking robot at home, to explore new design ideas, and, perhaps, to enjoy the operation of one of these robots as it moves across the ground.

 MDA Press
MDA Press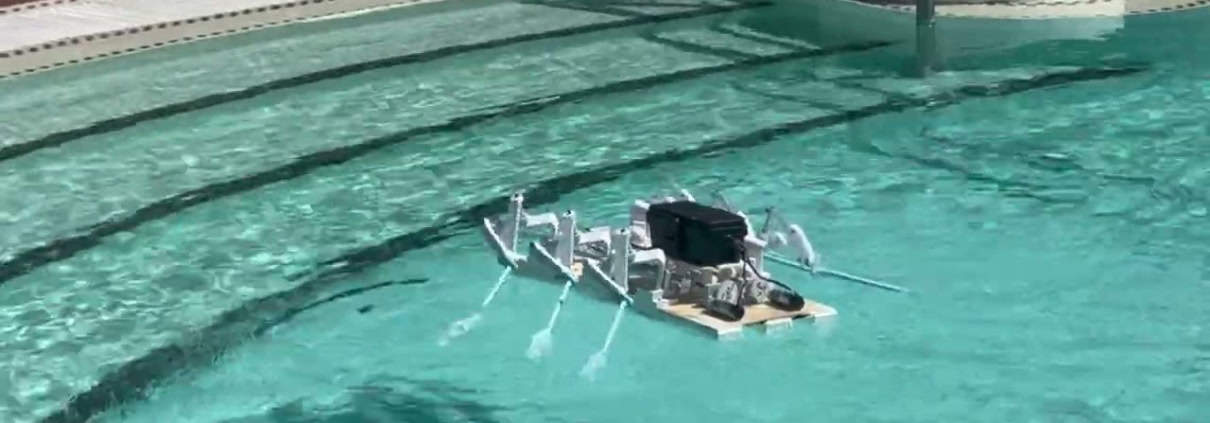
 MDA Press
MDA Press MDA Press
MDA Press MDA Press
MDA Press MDA Press
MDA Press MDA Press
MDA Press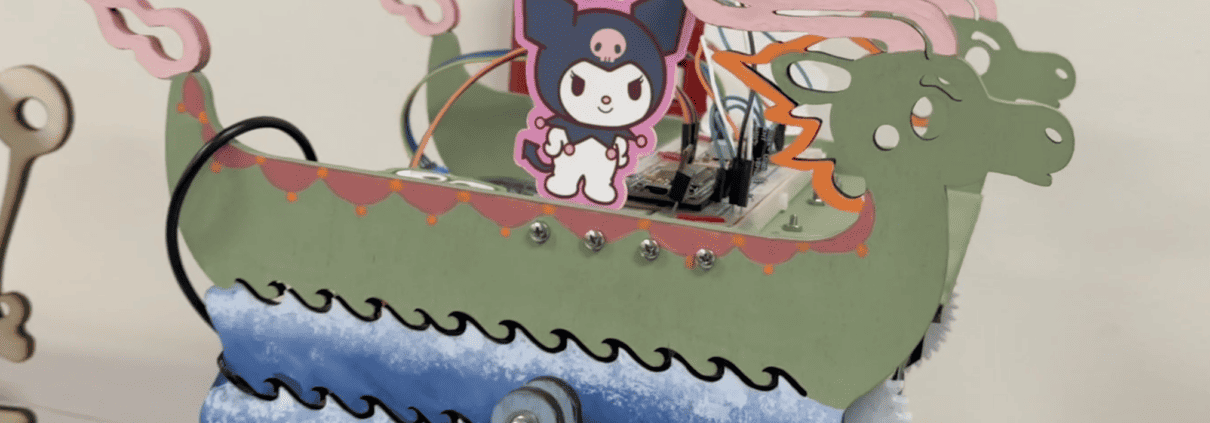 MDA Press
MDA Press
 MDA
MDA