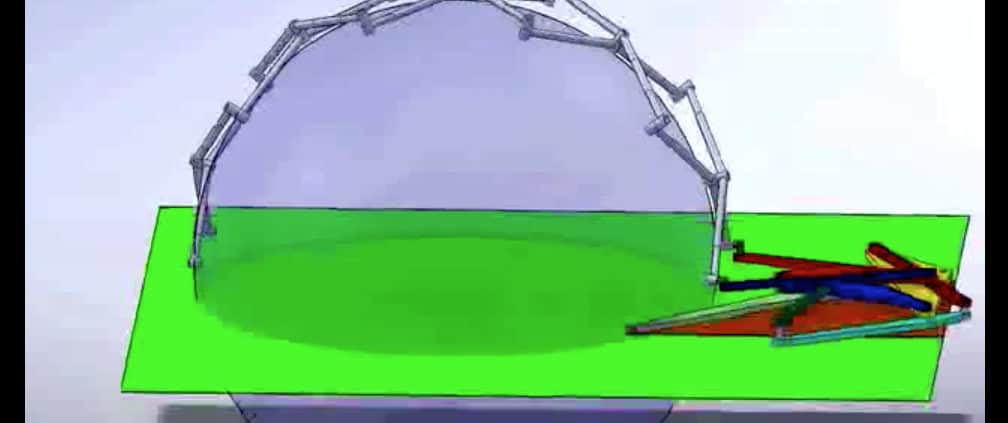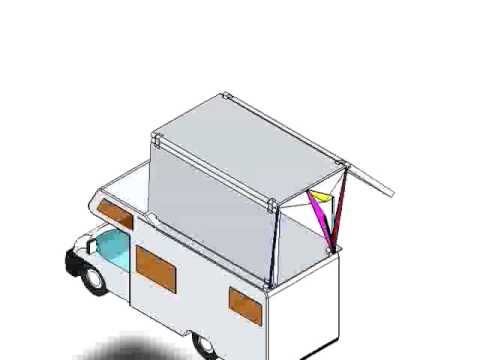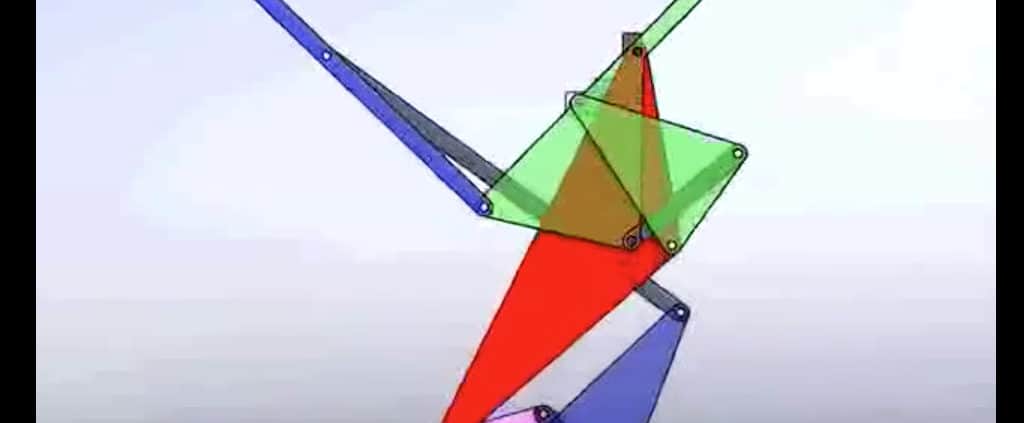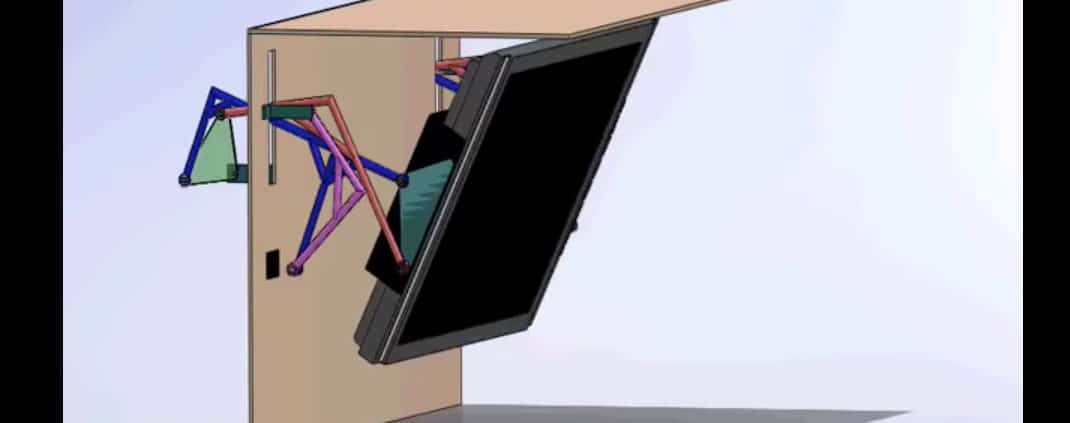
TV deployment linkage
Mikhail Zhuk generated this animation of Jerome Choe’s concept for a six-bar linkage that rotates a 70in TV monitor down from the ceiling around a virtual pivot positioned down from the ceiling and in front of the wall. We hope to build a physical prototype. (UCI Robotics and Automation Lab)