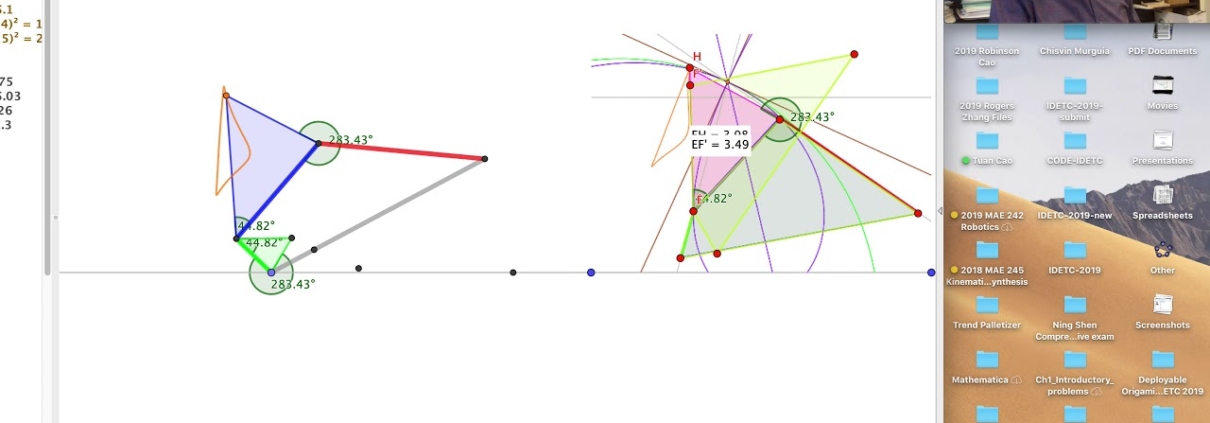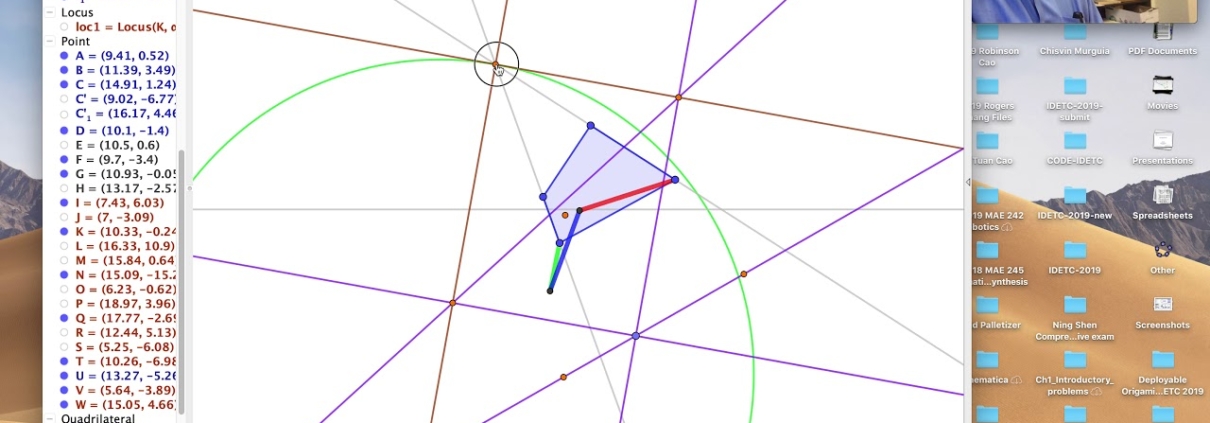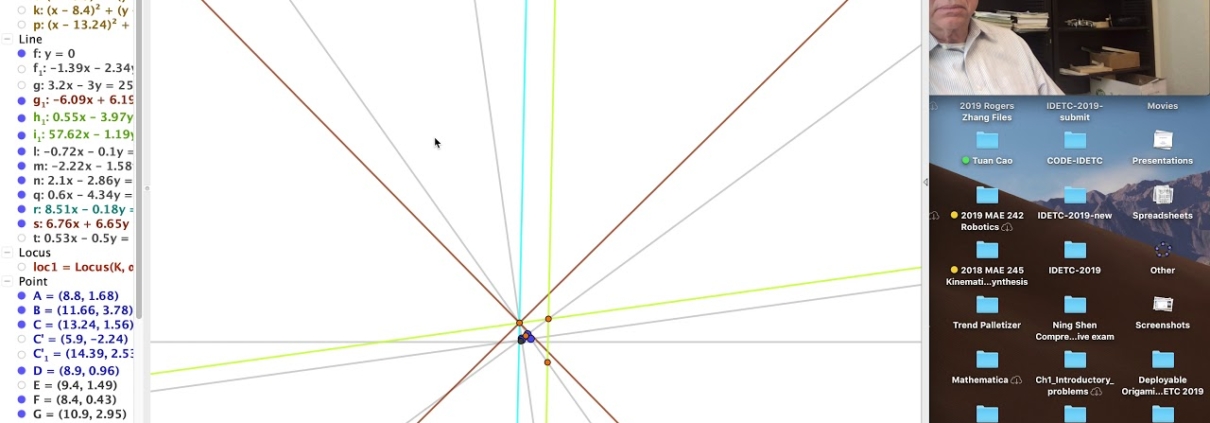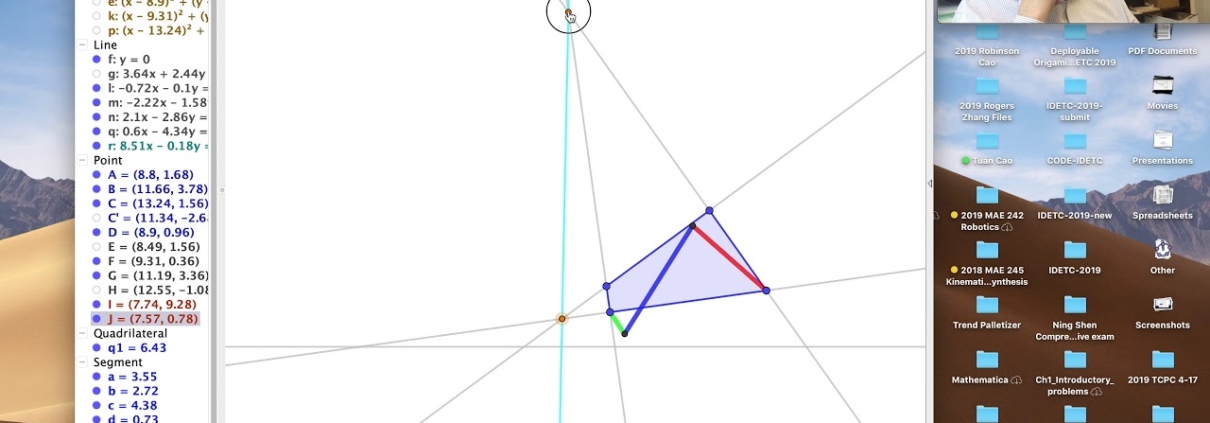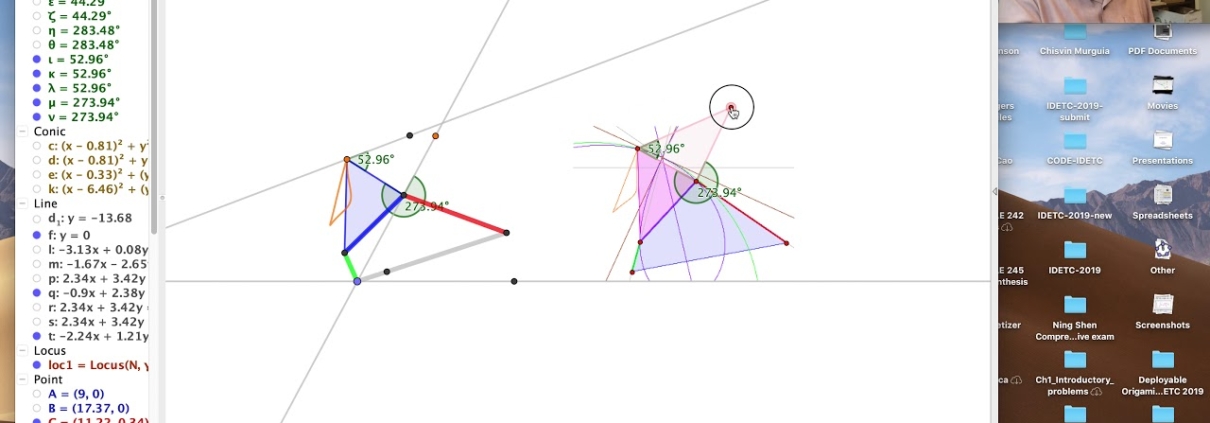
Construction of a Skew Pantograph Leg Mechanism
This video adds a skew pantograph to a four-bar linkage in order to reorient and change the size of the coupler curve. The result is a six-bar leg mechanism with a foot trajectory that is a scaled version of the original coupler curve.