 MDA
MDAFour-legged Mechanical Walkers: Teams 2, 4 and 5
Here are videos of the designs for the four legged mechanical walkers obtained by Teams 2, 4 an 5. This is the final project in my Fall 2019 Kinematic Synthesis course.

Here are videos of the designs for the four legged mechanical walkers obtained by Teams 2, 4 an 5. This is the final project in my Fall 2019 Kinematic Synthesis course.
Here are videos of the designs for the four legged mechanical walkers obtained by Teams 1, 3 an 6. This is the final project in my Fall 2019 Kinematic Synthesis course.

This video shows how the linkage systems moving spooky decorations designed by my six student teams were combined into a Halloween display.

The Halloween decorations designed by project teams 4, 5 and 6 can be seen in the video

Students in my MAE 245 Advanced Kinematic Synthesis class have designed Halloween decorations using a four-bar linkage by itself or in combination with a parallelogram or pantograph linkage. You can see the work of teams 1, 2 and 3 in the video.

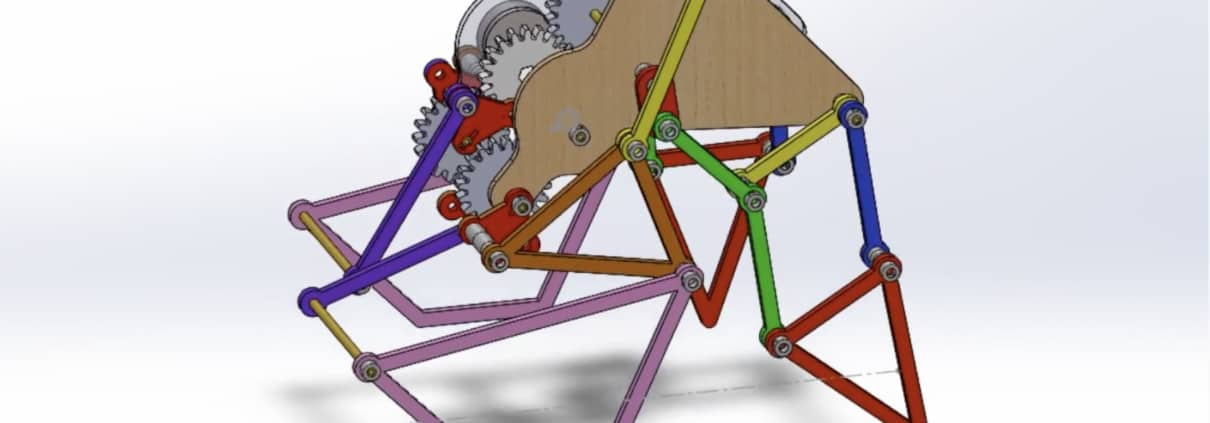
Here are the solid models of some of the walkers designed by UC Irvine students in my Spring 2019 course MAE 183 Kinematic Synthesis of Mechanisms.
Walker Group 1
Walker Group 2
Walker Group 4
Walker Group 6
Walker Group 8
Walker Group 9
Walker Group 10

This is an animation of the leg mechanism for a mechanical walker designed using function generators to drive the hip and knee joints. A second parallelogram linkage is used to construct a translating leg that allows placement of the foot trajectory where ever the designer chooses.

The graphical construction of a four-bar function generator that coordinates three input and three output angles is presented in the video below. It is possible to coordinate as many as five input-output angles, but this requires numerical calculations using software like our MechGen FG iOS application.
More notes on Kinematic Synthesis Also see my book Kinematic Synthesis of Mechanisms: a project based approach
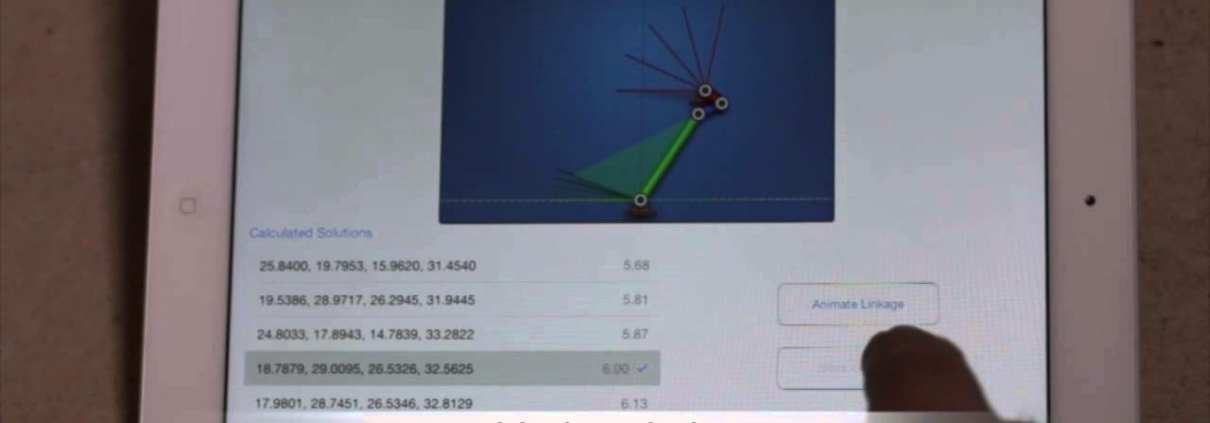
Our MechGen FG iOS application provides five position synthesis for four-bar linkages. A Demo of the iPad version is provided here. It is also available on the iPhone.

The graphical construction of a four-bar linkage that coordinates two positions of an input crank with two positions of an output crank is presented in this video using Geogebra.
A linkage that coordinates the values of input and output angles is called a function generator. It is possible to design a four-bar linkage to coordinate as many as five input and output angles. However, this requires numerical calculations using software such as our MechGen FG iOS application.
More notes on Kinematic Synthesis Also see my book Kinematic Synthesis of Mechanisms: a project based approach
 MDA
MDA