
Intro to Racecar Engineering: 19 Smitty’s Library
Smitty shares his library of resources.

Smitty shares his library of resources.

Smitty shares team do’s.

Smitty shares team don’ts.
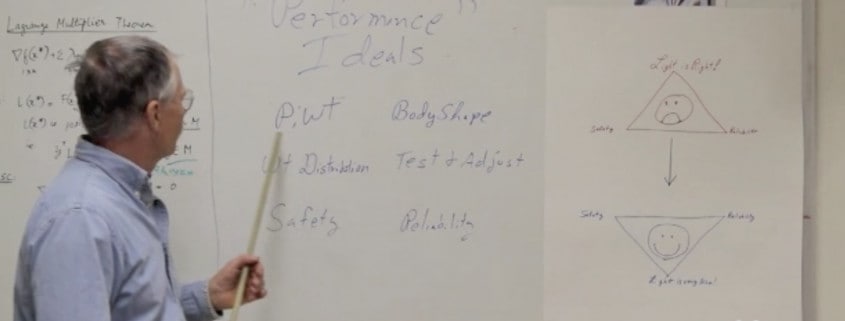
Smitty discusses performance ideals and overall principles such as weight distribution, body shape, and safety.

Smitty shares information regarding electronic fuel injection systems.
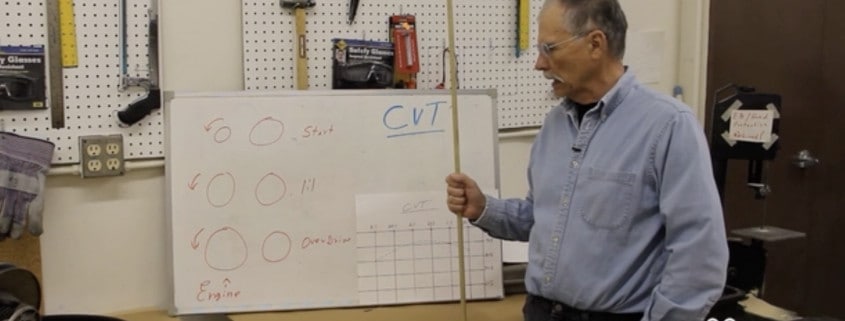
Smitty describes continuously variable transmissions. This is the fourteenth video in a series developed for UCI’s racecar engineering program.

Smitty shares tips of the trade regarding tires.

Smitty describes the importance of the toe and camber.

Smitty describes king pin inclination. This is the eleventh in the video series developed for UCI’s racecar engineering program. (Smitty and the Professor series)

David finds Qishu to be more than he expected in Chapter 5 of R. W. Frost’s Superluminal.