Wing Mechanisms
Repurposing Jansen’s Leg Mechanism:
Innovative mechanical flyers were designed by student teams in my Kinematic Synthesis class based on a repurposed version of Jansen’s leg mechanism. The artist Theo Jansen has inspired many of my students with his dramatic assemblies of leg mechanisms to form his Strandbeest wandering on a beach under the power of a sea breeze.
A generalization of Jansen’s leg has the hip and knee joints driven by separate four-bar function generators to provide a wide variety of foot trajectories. This generalized version of Jansen’s linkage can be adapted to form a wing mechanism that has a desired wing-tip trajectory.
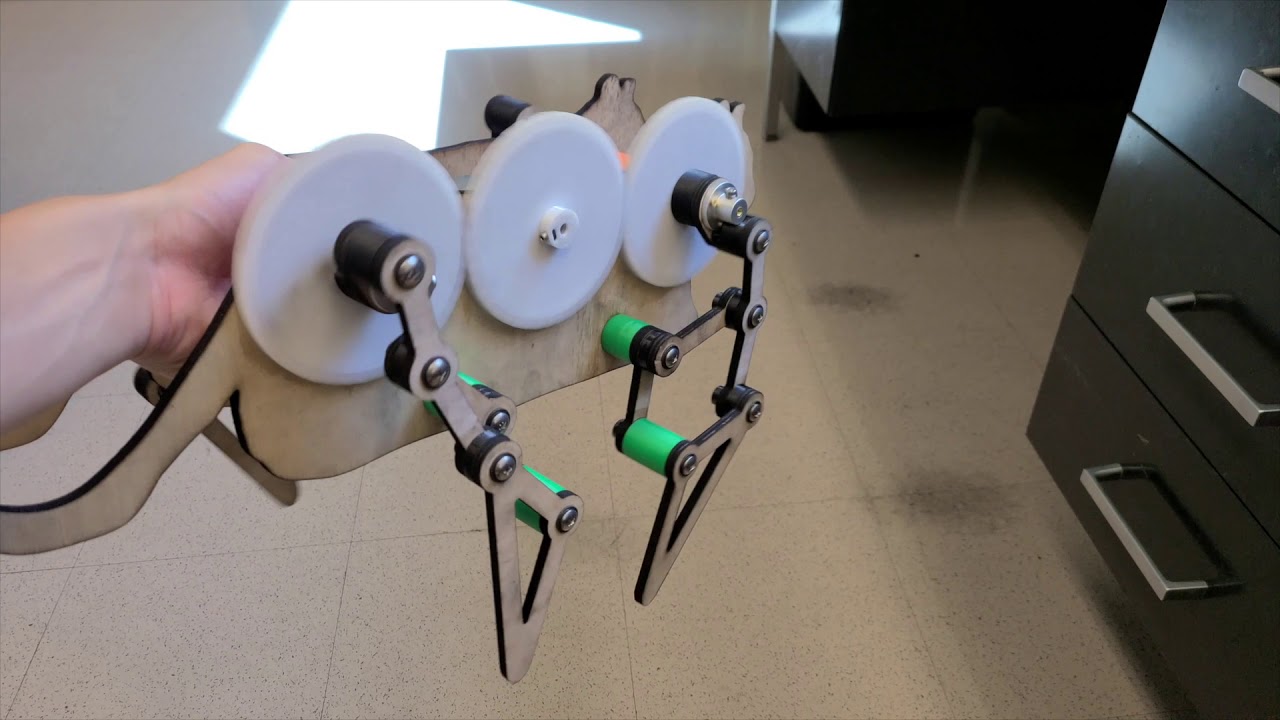
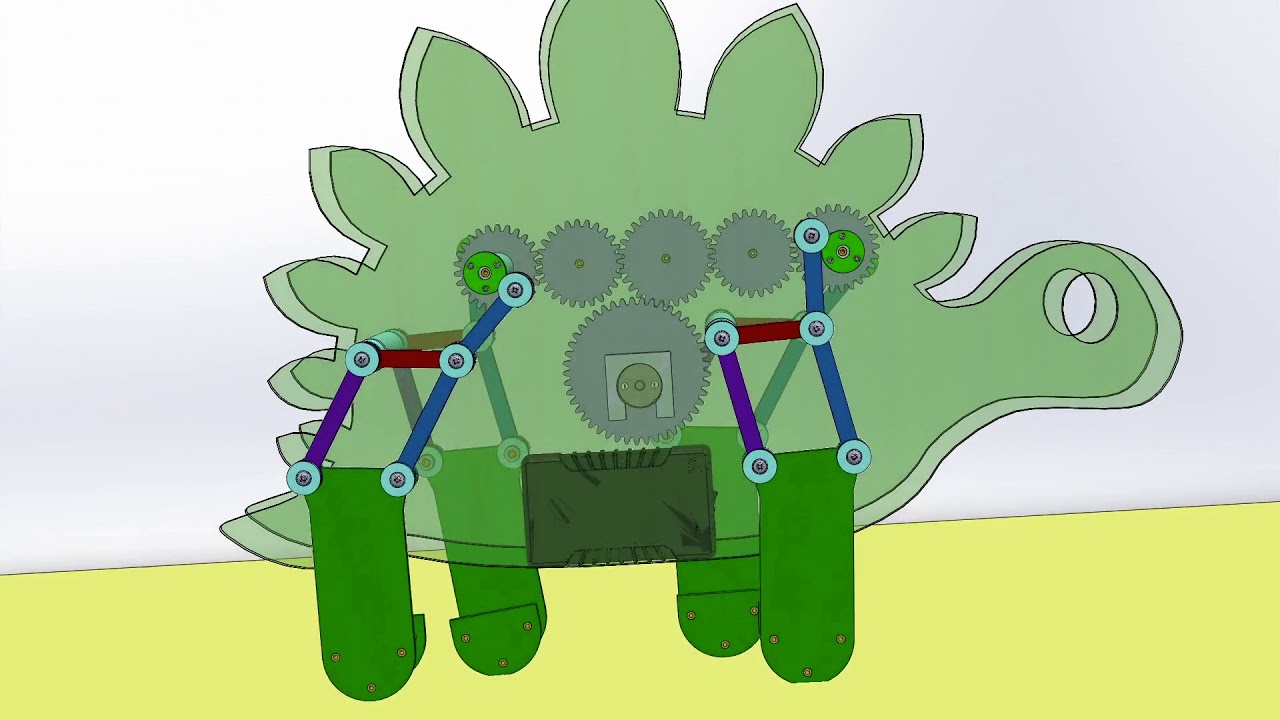
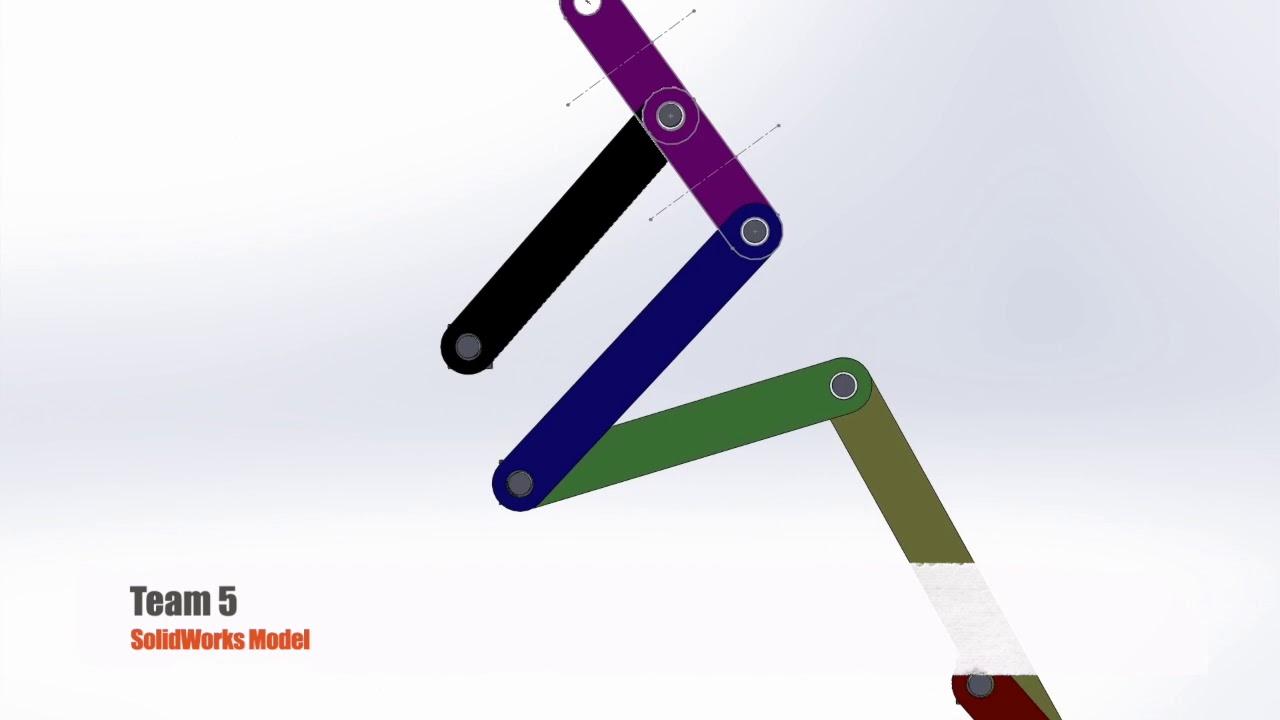
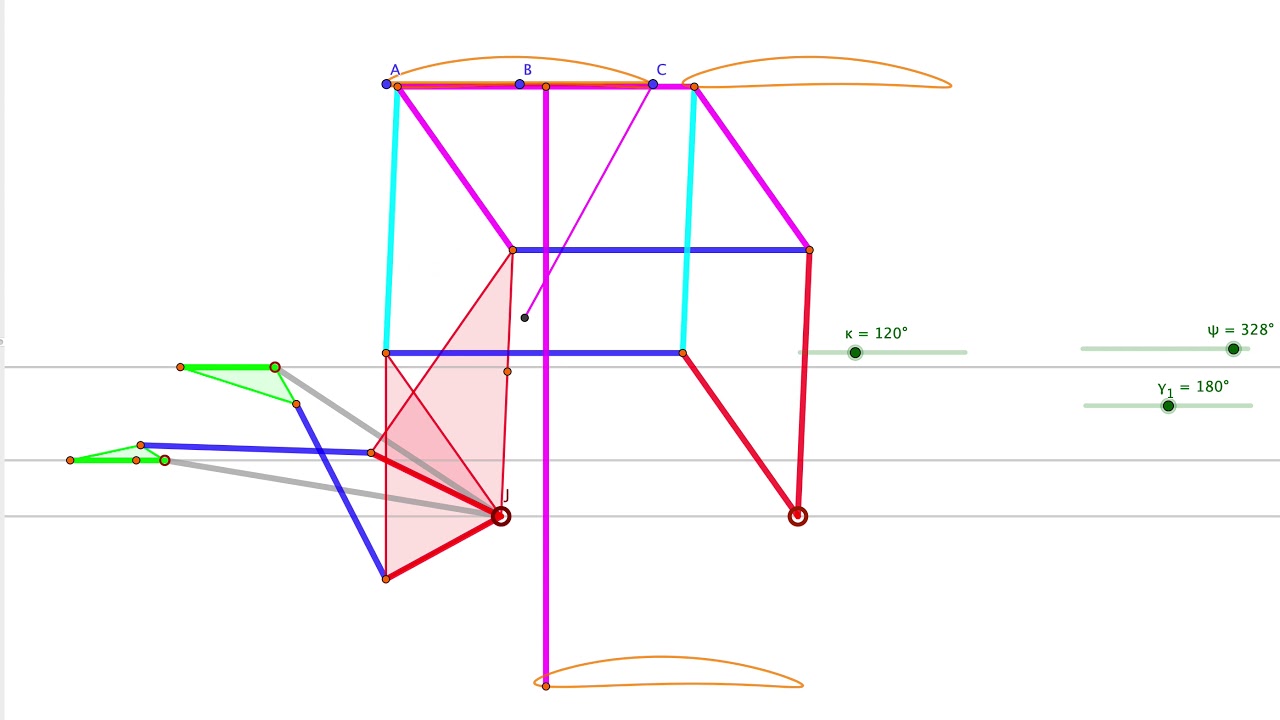
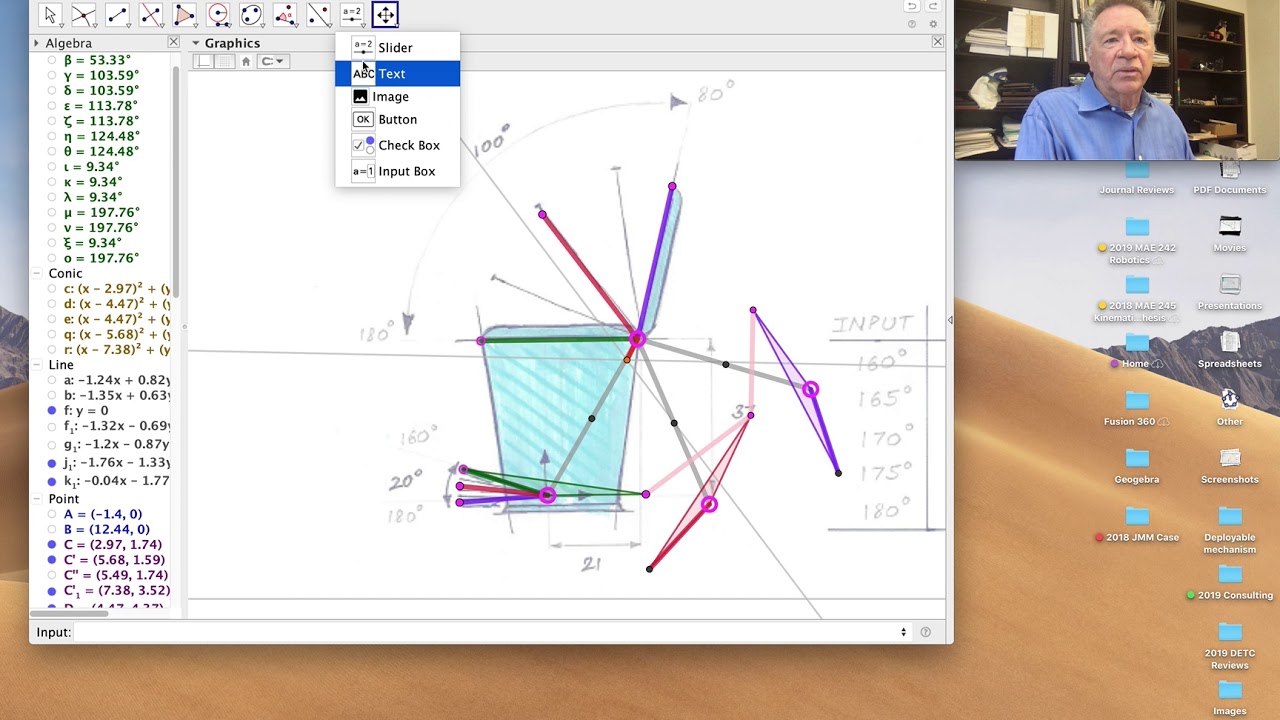
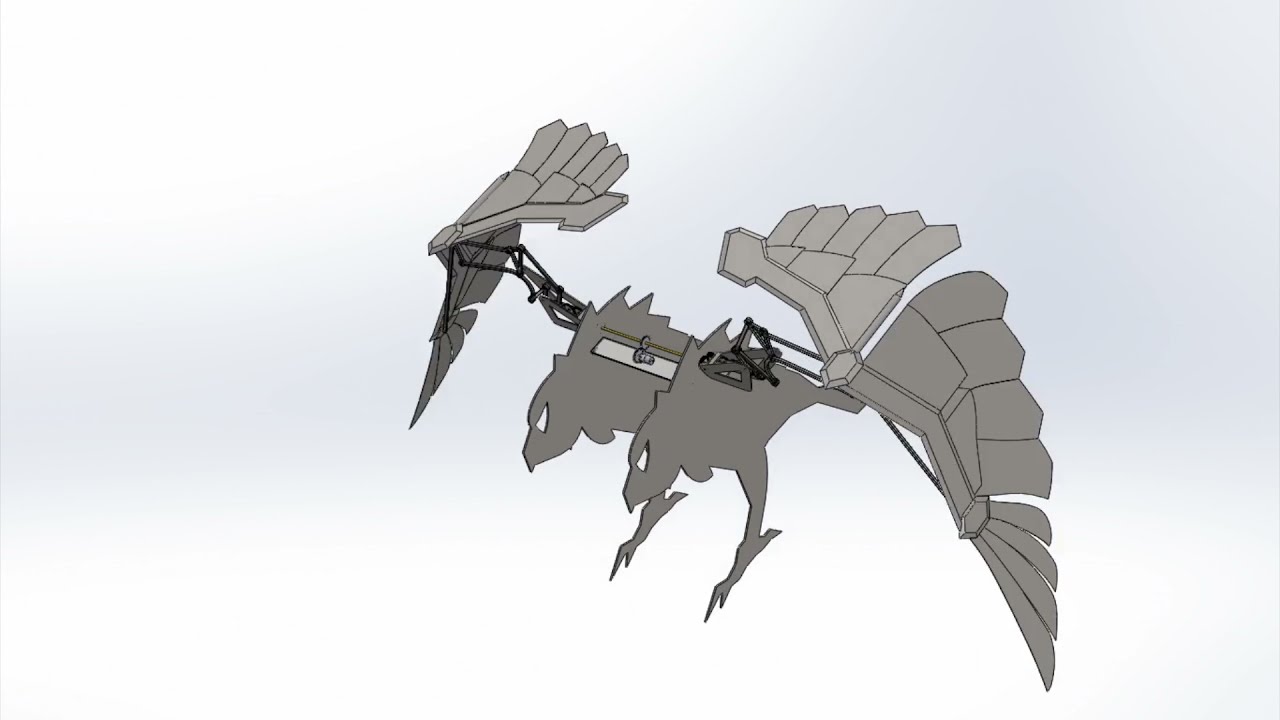
This video shows the Geogebra model of a wing mechanism based on Jansen’s linkage, and three digital prototypes of mechanical flyers obtained by my students using this mechanism.
View Post