
Rectilinear eight-bar linkage
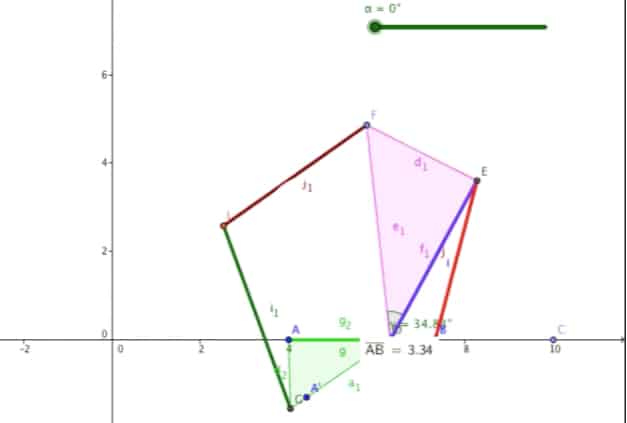
This animation was prepared by Yang Liu for a linkage designed by Kaustubh Sonawale. The eight-bar linkage guides the platform in the approximation to rectilinear motion.

This animation was prepared by Yang Liu for a linkage designed by Kaustubh Sonawale. The eight-bar linkage guides the platform in the approximation to rectilinear motion.

This is an animation of a Watt I six-bar linkage with a translating link that does not rotate (select the video to begin the animation). This is obtained using GeoGebra to execute a construction described by E. A. Dijksman in his book Motion Geometry of Mechanisms.
Rectilinear Linkage

Disney Research guides two degree-of-freedom open chains using the coupler curve of a geared five-bar linkage to obtain geared seven-bar and nine-bar linkages, which they use to move the front and rear legs of their Cyber Tiger. By connecting the driving gears of the four legs, they obtain a one degree-of-freedom system that animates the Cyber Tiger.
The computational design system uses an optimization routine to adjust the coupler curve of the five-bar linkage to approximate a given curve in order to guide the system in a desired movement. The results are terrific, and look a lot like the mechanical toys of the past. Select this link for more information.