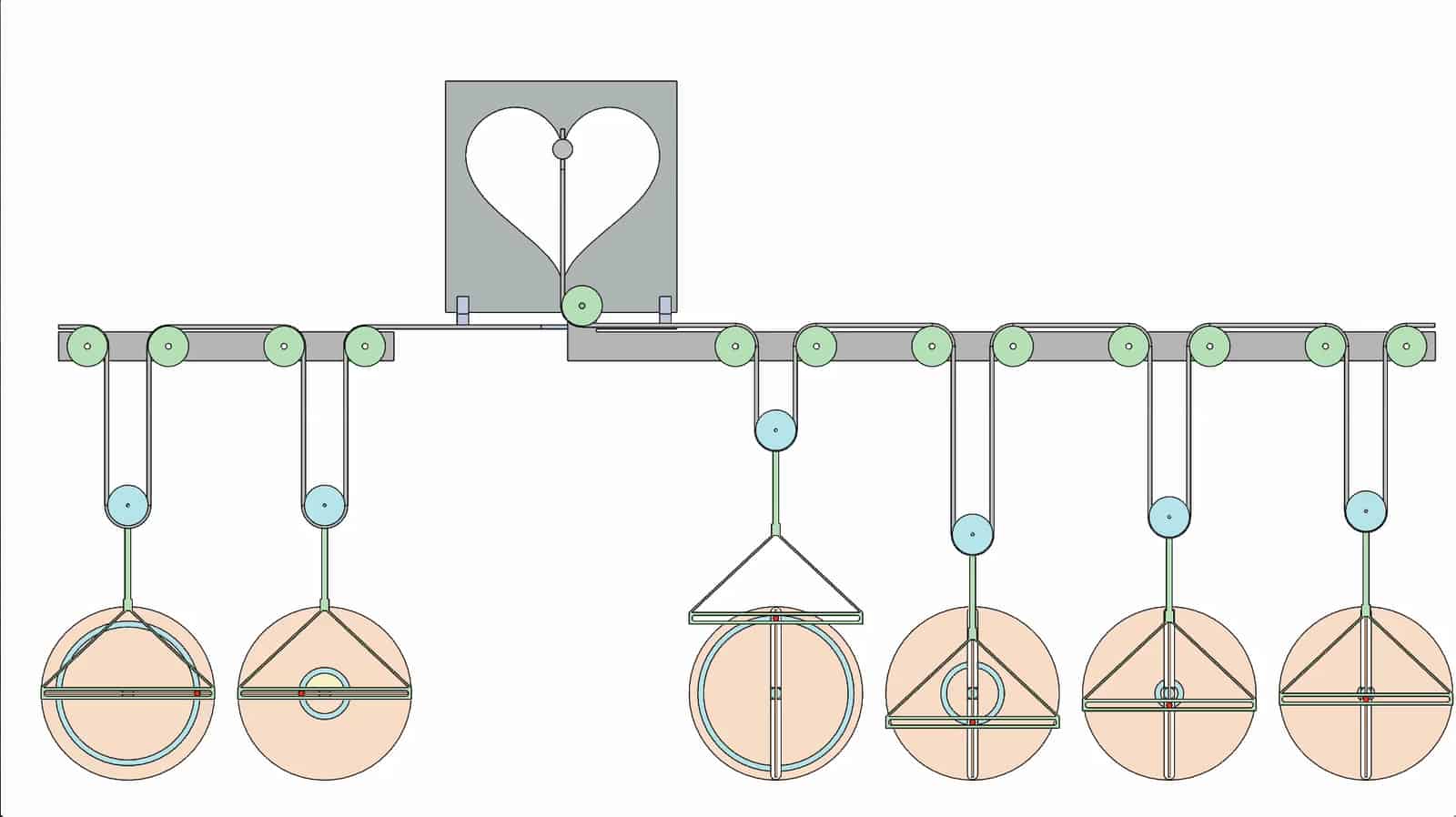
This mechanical system was designed by Yang Liu to trace the shape of a heart. The work is inspired by the mechanical 32-element harmonic synthesizer described by Dayton Miller in the 1916 article in the Journal of the Franklin Institute.
Michael Sutherland and his team at Zennen Engineering designed this full-size folding bicycle that has a dramatically different folding action from current designs.
Zennen Engineering has a new concept that they are kind enough to say was inspired by our UCI Folding Structure. This new design rotates the rear wheel support around the bottom bracket, and folds the front forks against the down tube and seat tube to form a compact package. It is a unique movement.
Jon Stokes, in our Robotics and Automation Lab, helped by adding the four-bar function generator to combine the two folding actions. It is a great concept, and it will be interesting to see if it achieves commercial success.
Montague Bikes provides a popular line folding full sized bicycles, which fold sideways around the seat tube.
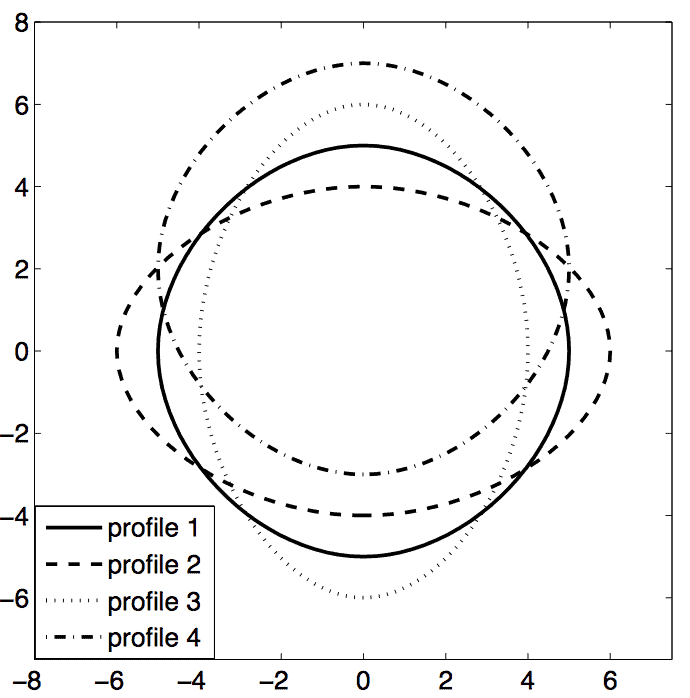
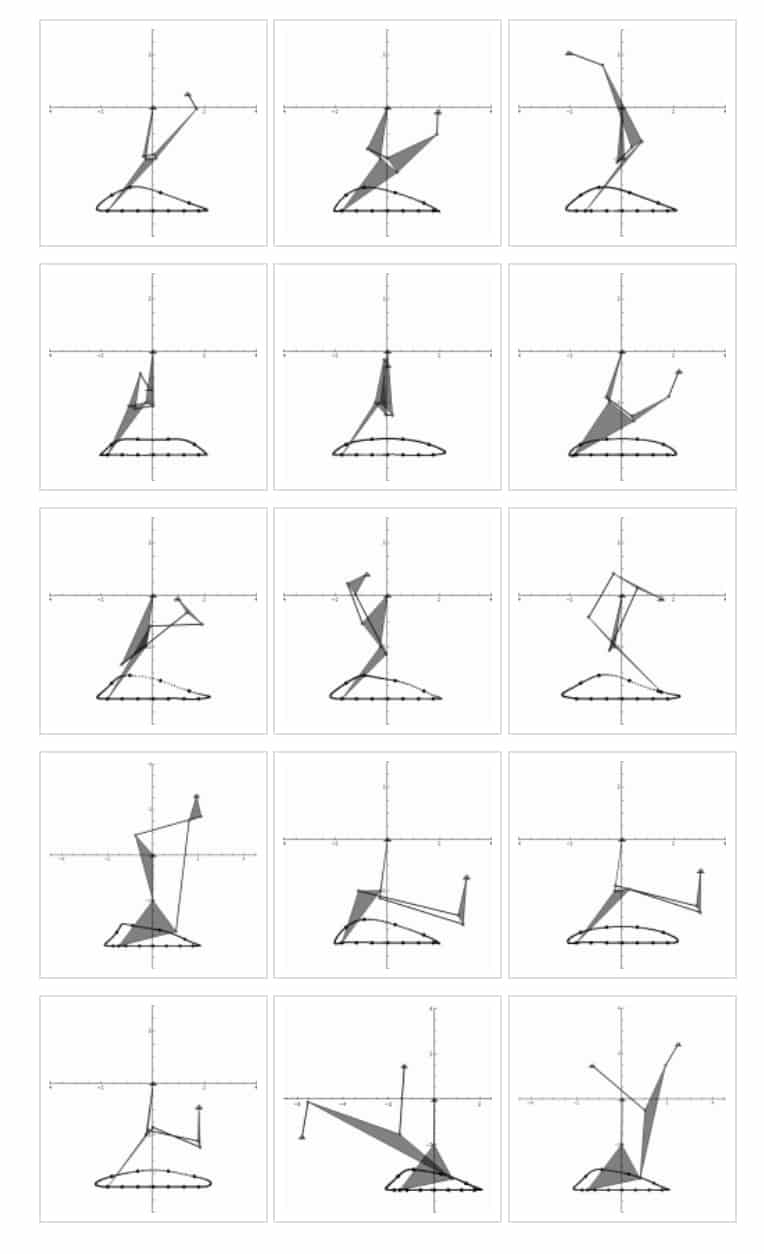
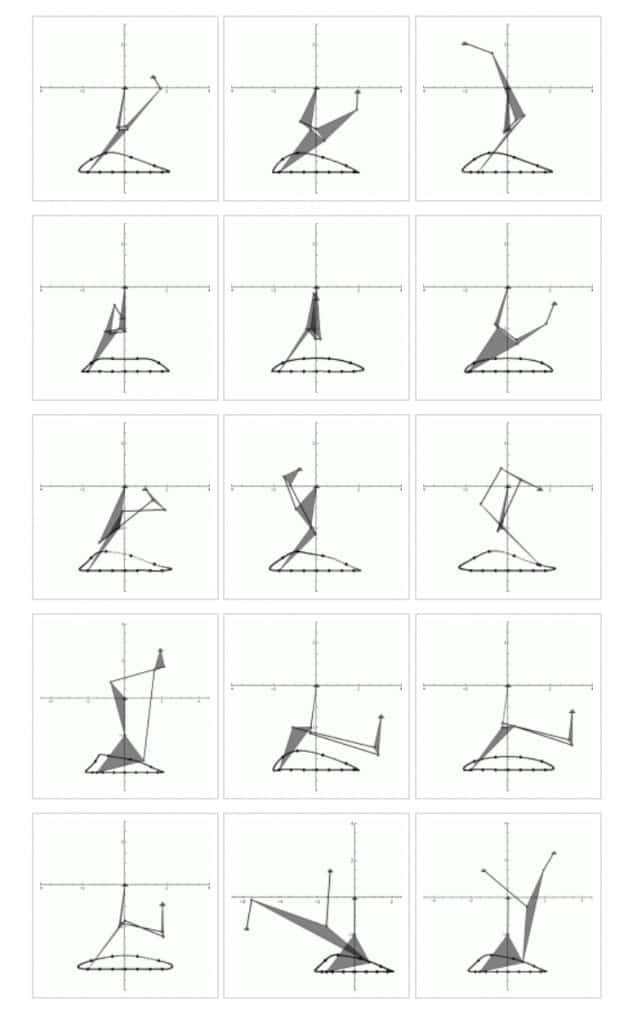
Lawrence Funke and Prof. James Schmiedeler of the University of Notre Dame Locomotion and Biomechanics Lab show that the movement of a morphing linkage through its target profiles can be improved by coordinating actuation of the sub-chains. This was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. The video below shows the improvement obtained by moving from 1 to 3 coordinated actuators.
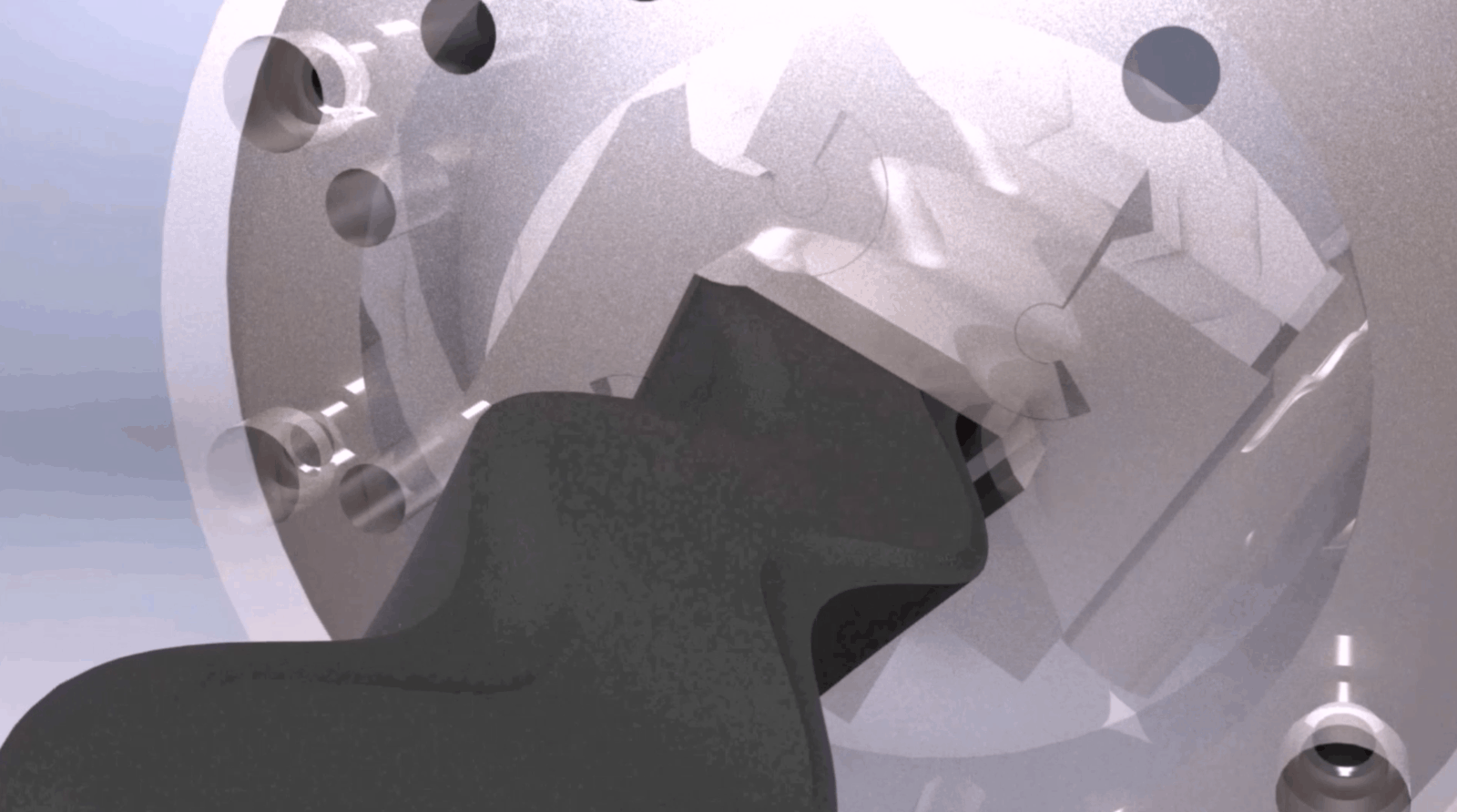
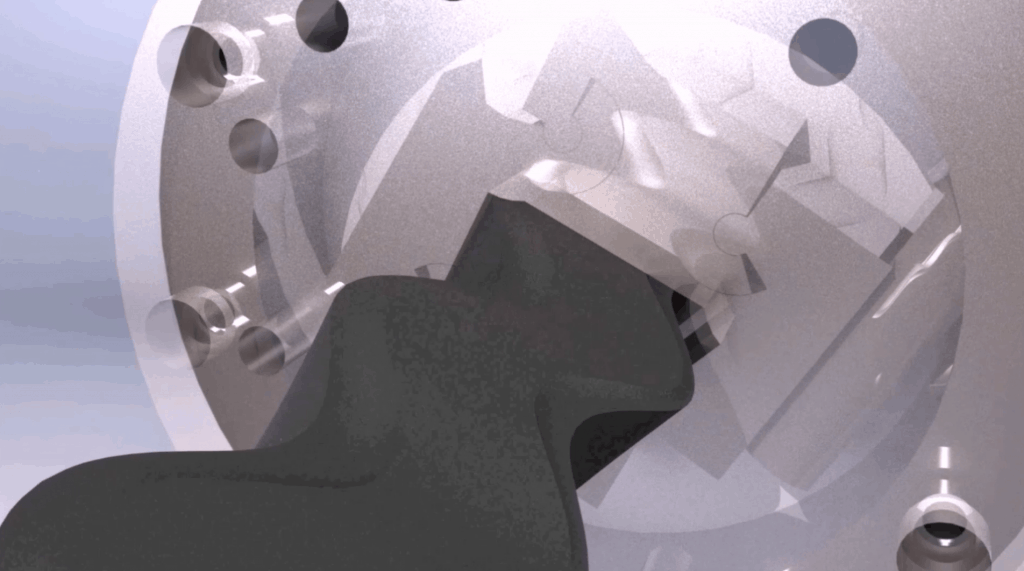
Prof. Andrew Murray and his team at the Design of Innovative Machines Laboratory have developed a dynamic extrusion die that changes shape while in operation. This provides a new capability for rapid manufacture of innovative geometry for metal and plastic bars, channels, hoses, and more. For more information see his laboratory website, University of Dayton DIMLab.
This video provides an extreme introduction to the DIM Lab at the University of Dayton.
https://mechanicaldesign101.com/wp-content/uploads/2015/07/Fourbar-extrusion.png8921600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2015-07-30 16:30:382022-09-17 09:29:49A four-bar linkage provides a shape changing extrusion die
An outcome of Mark Plecnik’s research on the kinematic synthesis of six-bar linkages is a variety of designs for the leg mechanisms of small walking machines.
We hope to build this walker over the summer. It has one drive motor on each side:
This is my favorite because it couples the legs on one side with a pantograph linkage. The leg joints are living hinges. and it seems this the entire leg system can be cut from a single sheet of plastic:
This is a design study for a walker with eight legs on one side, 16 total:
Select this link, Four-bar linkages, for a Geogebra book that illustrates linkages ranging from a lever to a crank-rocker that open a door. This includes the construction of a four-bar linkage that coordinates the open and closed positions with specific input crank angles, called a four-bar function generator. The iPad application, MechGen FG, computes four-bar function generators for five coordinated values of the input and output cranks.
https://mechanicaldesign101.com/wp-content/uploads/2015/01/Four-bar-function-generator.jpg7621012Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2015-01-18 09:46:012019-03-25 21:19:26Four-bar function generator: Open a door
Please select this link to open the Geogebra Book containing constructions of a number of interesting linkages. This is an introduction to the useful movement available with articulated systems.
https://mechanicaldesign101.com/wp-content/uploads/2014/12/GeogebraBook.jpg8381082Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2014-12-02 16:35:092019-03-25 21:22:08Introduction to Linkages
Researchers at Disney Research Zurich provide yet an other design system with the goal of moving digital character design into physical form. This work by Vittorio Megaro (ETH Zurich) and Bernhard Thomaszewski (Disney Research Zürich) and their colleagues can be viewed as two-position synthesis of four-bar “joints” that connect bodies in a serial chain, which are then driven by a sequence of four-bar function generators. They 3D print the result to obtain a cartoon character that moves with the rotation of a crank. Select this link for more information.
https://mechanicaldesign101.com/wp-content/uploads/2014/11/DisneyPrototyping.jpg388450Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2014-11-14 09:27:142019-03-26 20:38:16Linkage Synthesis at Disney Research Zurich
Training people to diffuse landmines and other live ordnance left behind in conflict areas has always been a difficult thing. Successfully training Explosive Ordnance Disposal (EOD) Technicians requires hands-on education that gives the technician a true understanding of how a triggering mechanism inside live ordnance actually functions. For this reason, this kind of education requires effective training aids. The traditional training aids–either replicas or inert ordnance–are fragile, difficult to make, too intricate to be understood fully, hard to obtain in the case of inert ordnance, and impossible to ship internationally. Allen Tan from Golden West Humanitarian Foundation in collaboration with Asst. Professor Gim Song Soh and his students at Singapore University of Technology and Design have come up with an innovative solution to the problems this type of education presents.
They have created training aids that are engineered for a better understanding of how ordnance trigger mechanisms work. The plastic training aids display exact replicas of trigger mechanisms in cross-section, which gives the future ordnance disposal technician a better view of the kinds of mechanisms they will find in a real mine field. The AOTM devices are also resilient enough for classroom teaching.
How are these devices delivered to the various regions around the world where they are needed? They’re not. They’re 3-D printed. This innovation not only defeats the impossibility of shipping this kind of item all over the world, it also centralizes the construction of the devices in the region where they will be used. Countries benefit from this development of “sustainable indigenous assets capable of dealing with these issues as they are discovered” rather than putting the training in the hands of a third party (quote from Advanced Ordnance Training Materials by Allen Tan). It is a more sustainable way to run this kind of program.
Better training materials and affordable ways of providing them will lead directly to more effective—and safer–ordnance disposal programs around the world. The work that Professor Soh and his students at Singapore University of Technology and Design are doing with advanced ordnance teaching materials combines design innovation, active learning practice, and a forward-thinking embrace of 3D printing.
This animation prepared by Prof. Soh and his students illustrates the components of the SOTS-M2A1 trigger mechanism.
https://mechanicaldesign101.com/wp-content/uploads/2014/09/Screen-shot-2014-09-09-at-4.10.31-PM.jpg476709Chris McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngChris McCarthy2014-09-11 18:32:262022-09-17 09:43:023D Printed Demining Training Aids