Waldron Fest: May 16-17, 2013
Waldron Inspires
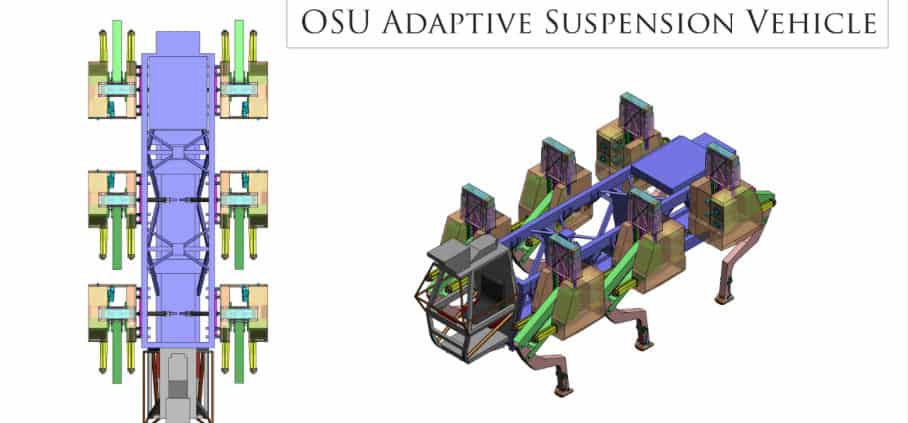
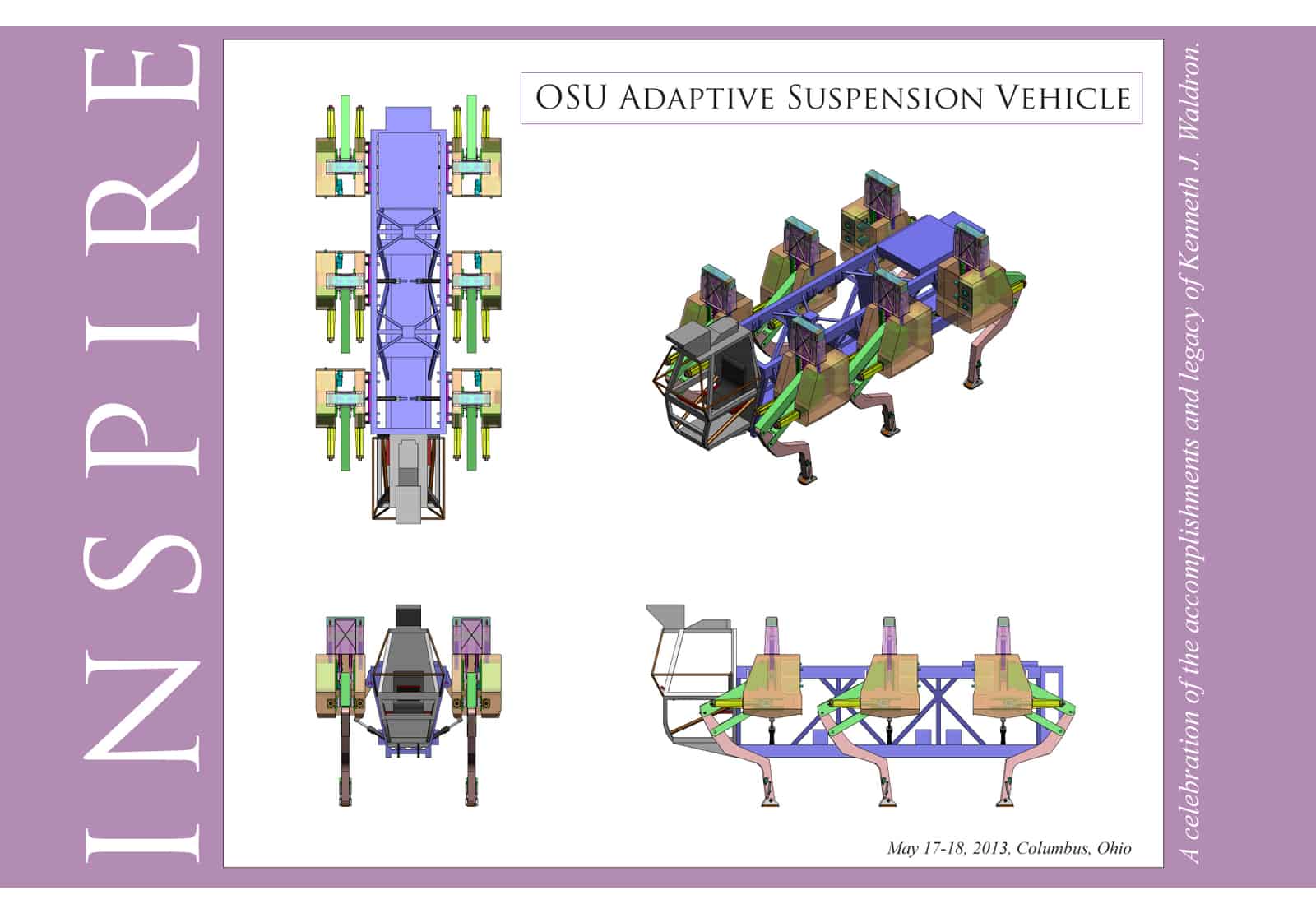
This poster was prepared as a gift to Ken Waldron on his 70th birthday and given to him at a conference organized in his honor. Anuj Taneja generated the SolidWorks model in 2006 from the original drawings of the Adaptive Suspension Vehicle. I recently found the electronic files and Kaustubh Sonawale generated the four-view drawing. The ASV is an important feat of engineering and the stories shared by those who worked on it were wonderful.