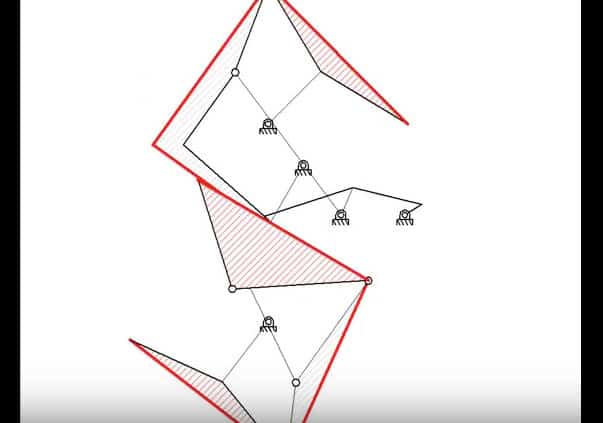
Four-bar linkage design using Mech Gen
This is the first assignment in my graduate mechanism synthesis class. It is supposed to be a flower with petals that open and close guided by a four-bar linkage. I did not realize that the shape I gave them for the petals would look so scary, but maybe it is appropriate for Halloween. This design was developed by Hsuan-Chen Wan.