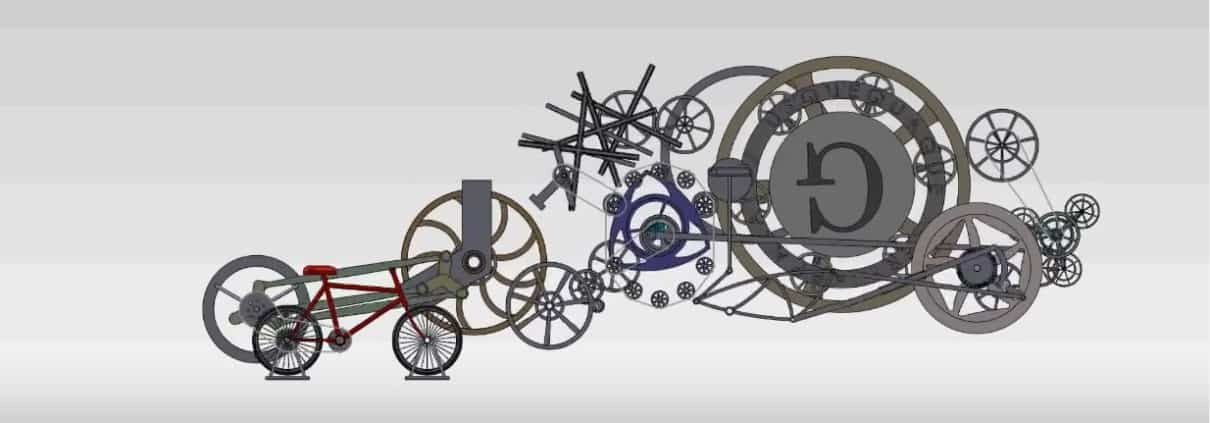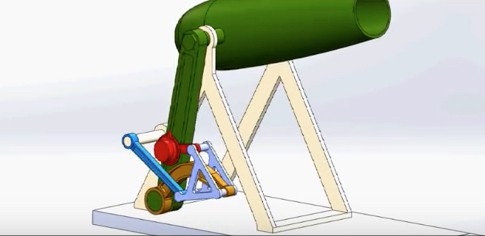
Mechanization of the ballistic function
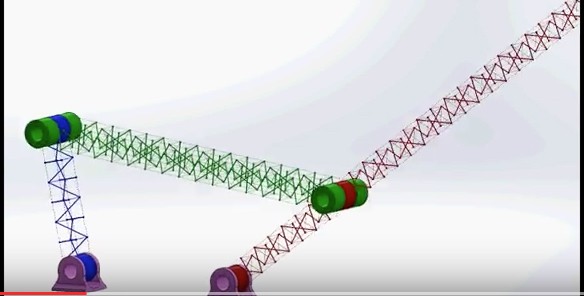
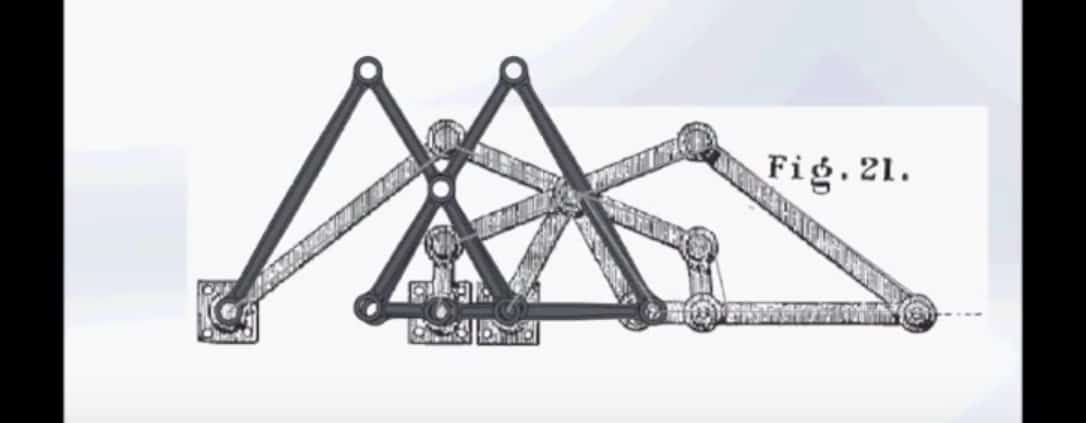
This Stephenson III six-bar linkage sets the elevation of a ballistic trajectory to reach a specified distance downrange given an initial velocity of 500 m/s. This function is described in Computing Linkages by A. Svoboda (pg 285). Mark Plecnik obtained this linkage after evaluating almost 100,000 different designs.