 MDA
MDAFour-legged Mechanical Walkers: Teams 2, 4 and 5
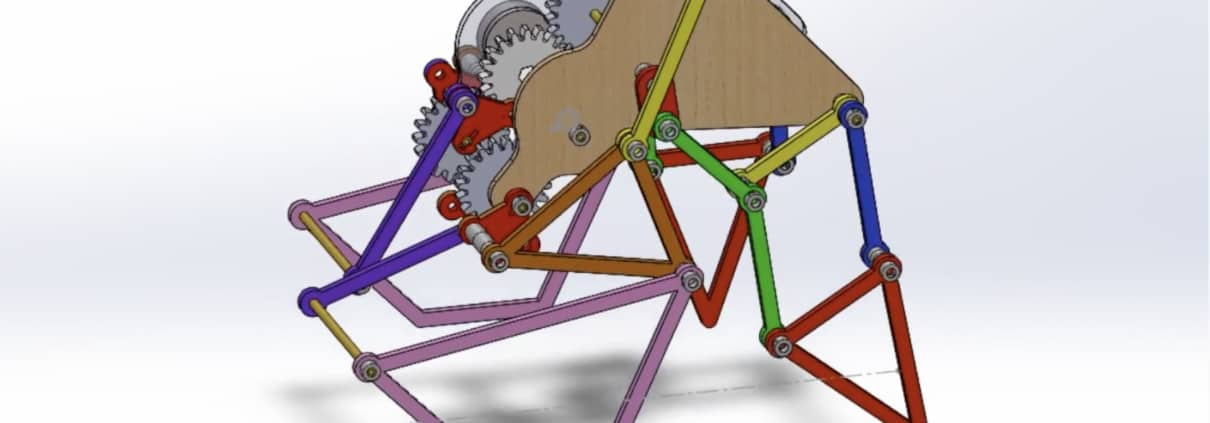
Here are videos of the designs for the four legged mechanical walkers obtained by Teams 2, 4 an 5. This is the final project in my Fall 2019 Kinematic Synthesis course.

Here are videos of the designs for the four legged mechanical walkers obtained by Teams 2, 4 an 5. This is the final project in my Fall 2019 Kinematic Synthesis course.
Here are videos of the designs for the four legged mechanical walkers obtained by Teams 1, 3 an 6. This is the final project in my Fall 2019 Kinematic Synthesis course.
 MDA
MDA