Austin Suh has designed this innovative car door linkage. He built a prototype that demonstrates this movement next to his Honda Civic for comparison. The 3D printed PLA linkage sits in one corner and lifts the door up and over the car. It is driven by a DC gear motor through a crank-rocker, which provides a back and forth movement for the demonstration.
https://mechanicaldesign101.com/wp-content/uploads/2025/02/Car-Door-Linkage-scaled.jpg15452560Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2025-02-24 16:13:192025-02-24 16:14:21Innovative Car Door Linkage
Austin Suh has designed a variety of spherical linkages that provide a unique movement to open a jewelry box. Here are some examples, one of which has a linear actuator to open the box at the touch of a switch.
https://mechanicaldesign101.com/wp-content/uploads/2025/01/Jewelry-Boxes.jpg8961600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2025-01-03 16:23:482025-01-03 16:23:51Spherical Linkage Opening a Jewelry Box
Jiaji Li has completed the design, fabrication and testing of his Oar-Driven Unmanned Surface Vehicle, better known as his Swimming Robot.
The video below shows a rendering of the final design, testing of the coordination of the oars, which are driven in sets of three by two motors. And, finally, shows the robot swimming in a straight line movement, gentle turning, and movement to two separate locations.
This water surface robot is a remarkable demonstration of the capabilities of 3D printed spherical linkages.
This trimaran designed by Jiaji Li has three oars supported by spherical four-bar linkages on each side. A motor on each side drives the set of three oars, and the relative speed of the motors steers the trimaran. The result is a robot that swims.
Please take a look at the videos demonstrating these Robot Walkers. Our study of minimal actuation for walking robots has lead to pairs of specialized leg mechanisms at each of four corners of the walker, eight in all. The robot is steerable with two separate drive motors, that is each side has four leg mechanisms connected through a gear train to a motor. This is a lot of moving parts, but the result is remarkable.
All of these robot walkers respond to commands from an infra-red remote control. They can go forward and backwards, speed up and slow down, turn right and left, and even spin in place.
It was a pleasure working with students on these projects. Their creativity and enthusiasm is fun to be around.
Stegosaurus Walker: This first video shows the Stegosaurus Walker designed and built by the team of Cristian Albrektsen, Itzel Montoya, Matthew Reber, John Williams, and Megan Yang. Select this link or the image.
The Grinch Walker: This second walker captures the Grinch Who Stole Christmas at the moment he brings the toys back to Whoville. It was designed and built by Melissa Lepe, Esteban Ruiz, Sebastian Petcu, Purushotham Verma and Jasper Yao. Select this link or theimage.
Tio de Nadal Walker: The third walker celebrates a Catalan tradition known as the Tio de Nadal, which is a magical log that delivers presents and warms the family. It was designed and built by Paula Simo, Lois Meira, Eudald Sangenis, and Marc Quiroga. Select this link or the image.
https://mechanicaldesign101.com/wp-content/uploads/2023/12/a-Stegosaurus.jpeg10731600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-12-19 07:38:292023-12-19 07:38:33Eight Legs, Two Motors and a Lot of Personality
Jiaji Li has succeeded in building a prototype Robotic Rowboat. I have used 3D printing technology ever since it was introduced decades ago to build spatial mechanisms and routinely failed, which is why this is a particularly satisfying outcome.
He convinced me to buy an inexpensive 3D printer and said he was sure PLA (poly lactic acid) would provide a strong but light-weight product. So I gave it a chance and find the result to be very nice.
Students at BYU formed a study group advised by Prof. Denise Halverson to explore Kinematic Synthesis. They invited me to join them to discuss Quaterions and how they are used in Kinematics.
I have not talked about this material in some time, so it was interesting pulling together the theory from many past talks, but I soon became afraid that I was assembling a short course, not a lecture. So I took a different approach.
Here is a video of the lecture. The notes that I prepared are posted below.
My Quaternions in Kinematics presentation is posted here.
https://mechanicaldesign101.com/wp-content/uploads/2023/10/BYU-Zoom-Lecture.jpg6911600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-10-18 11:27:502023-10-19 08:57:06Quaternions in Kinematics: BYU Lecture
This Eight-Legged Walker with two stepper motor drives controlled using a Bluetooth interface developed by Ruiqi Mao for his 2023 UCInspire project builds on work by Chenhao Liu, Jiaji Li and Ken Nguyen, and my senior project team of Tom Nguyen, Jonathan Chavez, Connor Linklater and Jonathan Lu.
Chenhao Liu was a 2022 UCInspire fellow who was in Covid lock down in China while he worked on his four-legged walker driven by DC motors and a bluetooth controller with Jiaji Li, a UCI PhD student.
Ken Nguyen developed both four-legged and eight-legged walkers using DC motor drives and infrared controllers. His early work has inspired much of what has followed.
The following videos show:
1. Ruiqi’s Summer 2023 eight-legged Panda walker which uses two stepper motors and a bluetooth interface,
2. The Winter 2023 four-legged GNK Walker which used two stepper motors and a bluetooth interface by my senior project team of Tom Nguyen, Jonathan Chavez, Connor Linklater and Jonathan Lu.
3. Chenhao’s Summer 2022 four-legged walker with two DC motor actuators and a bluetooth interface, and
4. Ken’s Winter 2022 eight-legged tank walker which uses two DC motors and an infrared controller.
Ruiqi’s Eight-legged Panda Walker (Summer 2023)
2. Four-legged GNK Walker (Winter 2023)
3. Chenhao’s Four-legged Walker (Summer 2022)
4. Ken’s Eight-legged Tank Walker (Winter 2022)
https://mechanicaldesign101.com/wp-content/uploads/2023/09/Ruiqi-Walker.png6621600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-09-04 17:27:572023-09-04 20:18:14Ruiqi Mao’s Panda Walker
Angelina Licos is a UCI engineering student who seems to have a gift for filmmaking along with her skills in project engineering. Select this link to see her video of the adventures of a Mini Starship Delivery Robot.
Mini Starship Delivery Robot and full sized friends
https://mechanicaldesign101.com/wp-content/uploads/2023/08/Mini-Starship-2.png4481198Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2023-08-25 16:25:072023-08-25 20:53:58The Mini Starship Delivery Robot
UCI is hosting SCR 2023: On September 14 and 15 Robotics researchers and graduate students from across Southern California will meet in UCI’s Pacific Ballroom to discuss the future of robotics.
Henrik Christiansen, Distinguished Professor of Computer Science and Engineering from UC San Diego will provide a Keynote Lecture on mega-trends, changes in workforce, emerging applications and the resulting new challenges in robotics.

 MDA Press
MDA Press MDA Press
MDA Press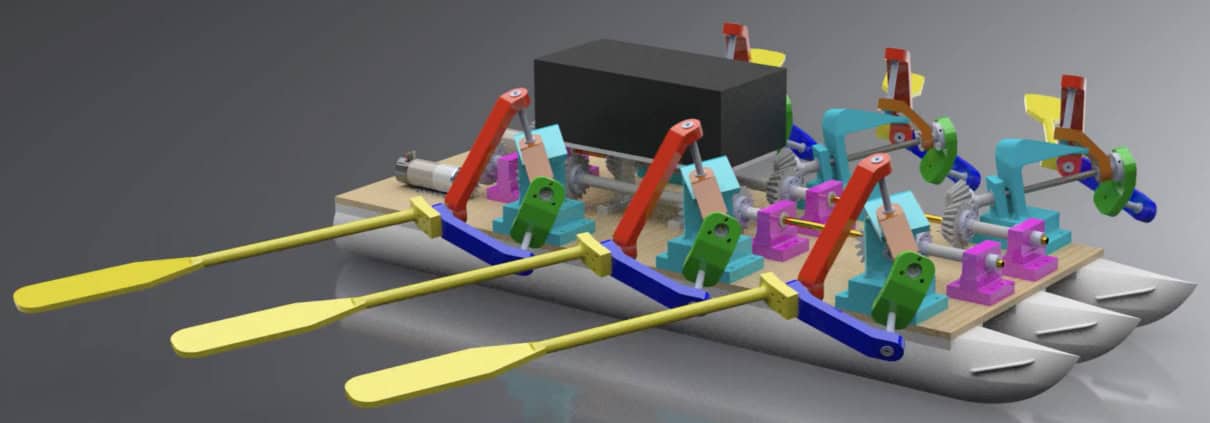 MDA Press
MDA Press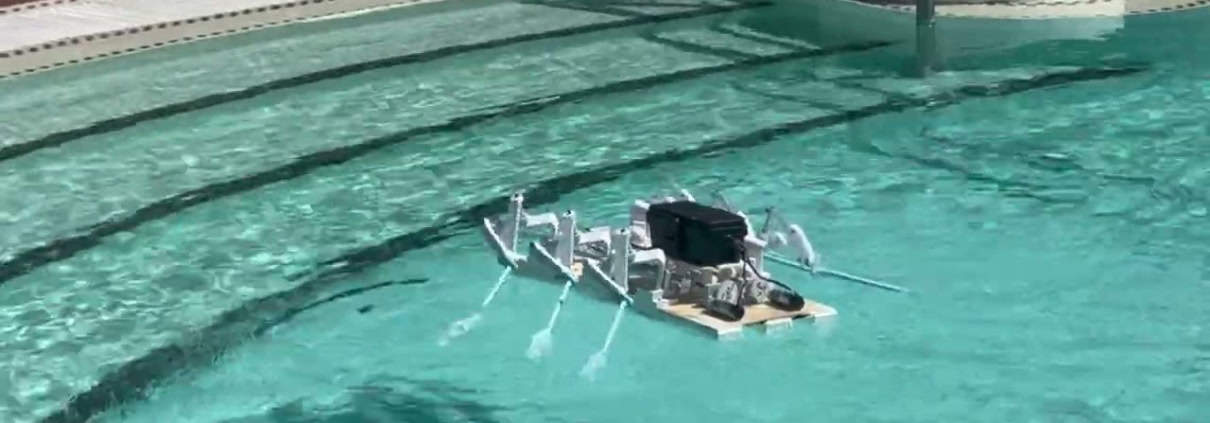
 MDA Press
MDA Press MDA Press
MDA Press MDA Press
MDA Press MDA Press
MDA Press MDA Press
MDA Press
