
Mechanical Advantage
This video from the University of Dayton narrated by Prof. Andrew Murray provides an excellent illustration of the important concept of mechanical advantage.

Lecture notes on specific topics.
This video from the University of Dayton narrated by Prof. Andrew Murray provides an excellent illustration of the important concept of mechanical advantage.


Svoboda: Computing mechanisms and linkages
Select this link to download a .pdf version of A. Svoboda, Computing Mechanisms and Linkages, Dover Publications, 1965, (17MB). This book was originally published by McGraw-Hill in 1948.


Kempe: How to draw a straight line
Select this link to download a .pdf version of A. B. Kempe, How to Draw a Straight Line, MacMillan and Co., London, 1877. (1.8MB)

21st Century Kinematics
The NSF Workshop on 21st Century Kinematics at the 2012 ASME IDETC Conference in Chicago, IL on August 11-12, 2012 consisted of a series of presentations and a book of supporting material prepared by the workshop contributors.
The book is now available at amazon.com: 21st Century Kinematics–The 2012 NSF Workshop.
And here are the seven primary presentations given at the workshop.
Colleagues joined in with two additional presentations:
Many thanks to the contributors and the attendees for an outstanding workshop.
I have spent quite a bit of time revising articles on machines in Wikipedia. I hope my contributions are an improvement.
When I started there was a lot of controversy over the definition of Machine, which forced me to introduce Machine (mechanical) and Mechanical system. This has changed and there is movement to move the definitions under a revised version of Machine.
Please take a look:
Anyone may edit Wikipedia, and it is intended to allow user communities to maintain the quality of particular sets articles. It is important that we take this opportunity because Wikipedia is an important resource to our students.


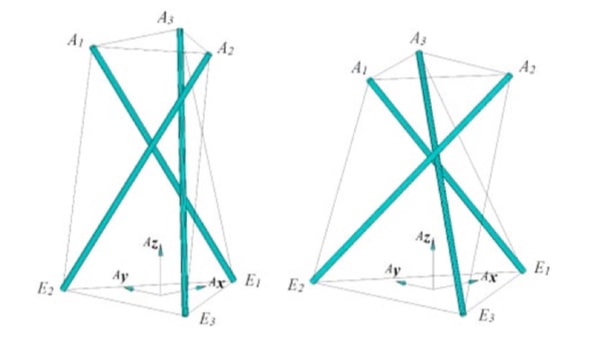
Here is something new. Our Mathematica notebook can find defect-free spherical four-bar linkages that guide a body through five orientations in a tolerance zone near a specified set of task orientations.
This is a draft of my editorial on 21st Century Kinematics for the Journal of Mechanisms and Robotics. It is a follow-up to my previous editorial on Kinematics, Polynomials and Computers. I would welcome your feedback.

Select this link to the .pdf of Kinematics, Polynomials, and Computers–A Brief History, which is a summary of the history of the kinematics of mechanisms and robotics with a focus on the challenge of solving the polynomial equations that arise in their study. It is a draft of my February 2011 editorial for the ASME Journal of Mechanisms and Robotics.
***Update*** This version has a correction to references [29] and [30].
Mathematica File for Linkage Synthesis
Select this link to download our Mathematica notebook for four-bar linkage synthesis. It will download as a textfile, so delete the .txt extension, then Mathematica should be able to read it. If you have an problems, please contact me.
This notebook is an example of the type of programs that I use to teach mechanism theory. In my courses students generate their own notebooks like this for the analysis and synthesis of various linkages. The program is not optimized in any way.
This particular notebook does provide a new capability. It uses a randomized search in tolerance zones near the required task positions to find linkages that do not have well-known defects. Cut and paste the text file output into our Mechanism Generator software to automatically generate a SolidWorks model of the linkage and task.

This video shows the operation of a cam-driven toy artist.
I found it on Dug North’s Automata/Automaton blog, http://dugnorth.com/blog/
My class notes on cam-follower systems can be downloaded at the link: http://synthetica.eng.uci.edu/mechanicaldesign101/McCarthyNotes-Cams2.pdf
