
 MDA
MDAThe Design of Mechanical Walkers: Spring 2020 Student Projects
While isolated to slow infections of the Coronavirus, over 60 UCI students learned how to apply the principles of Curvature Theory and Finite-Position Synthesis to the design leg mechanisms for mechanical walkers.
Their first team project was a four-legged walker that used the coupler curve of a four-bar linkage positioned using a skew-pantograph as the foot trajectory. Here are videos that show animations of their walkers
This is the first video:
And this is the second:
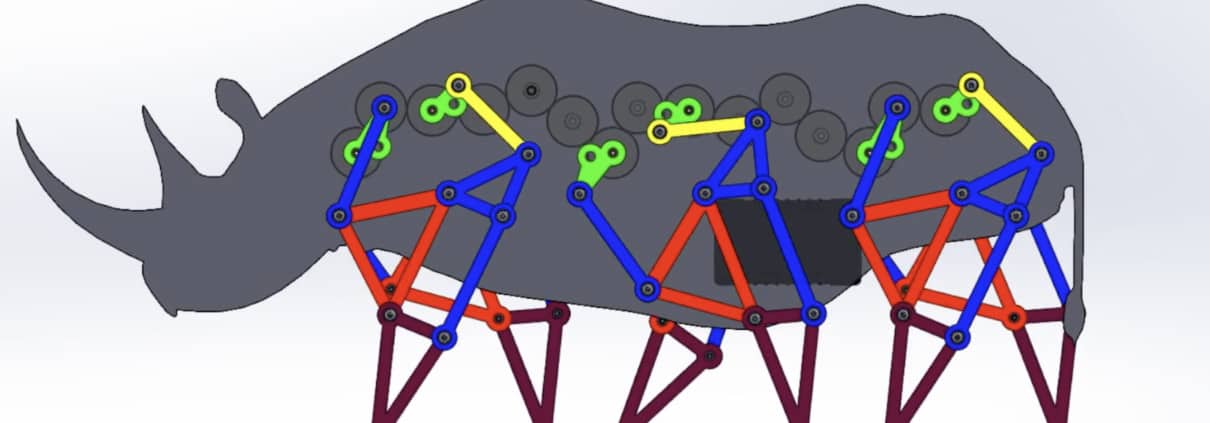
The final team project used finite-position synthesis to design function generators to drive the hip and knee joints and guide the foot trajectory. This mechanism is a generalization of the Jansen leg mechanism. Teams of three students designed the leg mechanism, the drive system and assembled them into a six-legged walker. Here are the videos of these walkers.
This is the first video:
And this is the second video:
The variety of these walkers show the versatility of the kinematic synthesis procedures, as well as the creativity of the students. It was a pleasure working with the students on these projects even with the challenges of remote instruction.