
 JMM
JMMConstruction of a Leg Mechanism
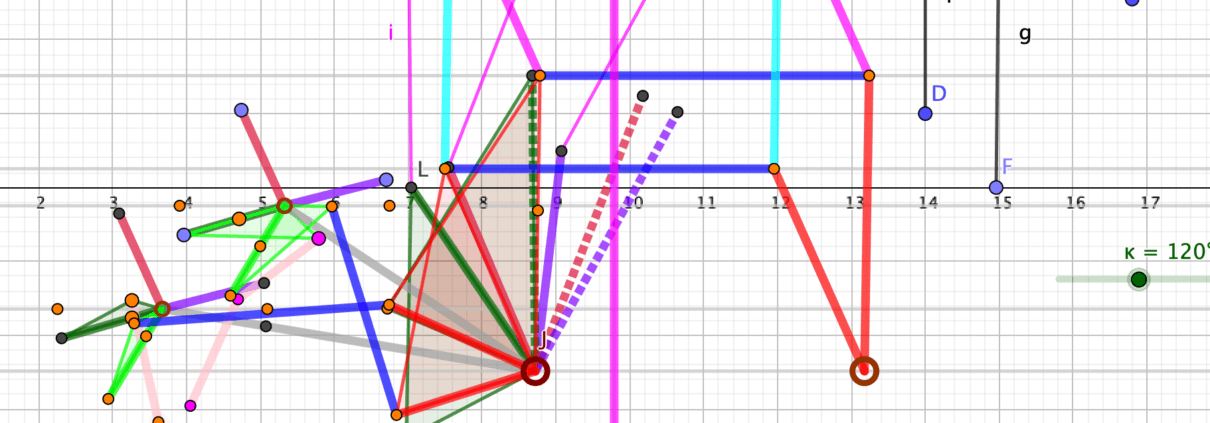
This is a series of four videos that show how to:
- Specify three positions for the foot of a leg consisting of a hip and knee joint;
- Use three position synthesis to design a four-bar function generator to guide the hip joint;
- Then use three position synthesis to design a second four-bar function generator to guide the knee joint;
- And finally assemble the linkage to determine the trajectory of the foot. Adjusting the lengths of the leg segments, the position of the hip, the specified positions of the input cranks, and the position of the coupler attachments to the input cranks vary the resulting foot trajectory. An example leg mechanism is shown at the end of this video.
Part 1:4 Setting up the design
Part 2:4 Synthesis of the hip function generator.
Part 3:4 Synthesis of the knee function generator.
Part 4:4 Assembly of the leg mechanism, exploration of design variations, and an example final leg design.