Full Size Folding Bicycle
Folding Bicycle
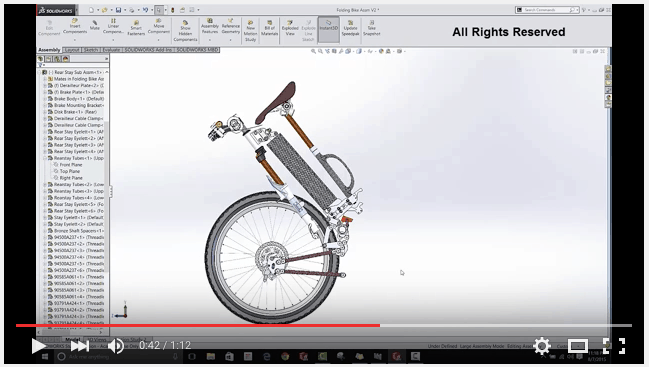
Michael Sutherland and his team at Zennen Engineering designed this full-size folding bicycle that has a dramatically different folding action from current designs.
Zennen Engineering has a new concept that they are kind enough to say was inspired by our UCI Folding Structure. This new design rotates the rear wheel support around the bottom bracket, and folds the front forks against the down tube and seat tube to form a compact package. It is a unique movement.
Jon Stokes, in our Robotics and Automation Lab, helped by adding the four-bar function generator to combine the two folding actions. It is a great concept, and it will be interesting to see if it achieves commercial success.
Montague Bikes provides a popular line folding full sized bicycles, which fold sideways around the seat tube.