
Walking Machines
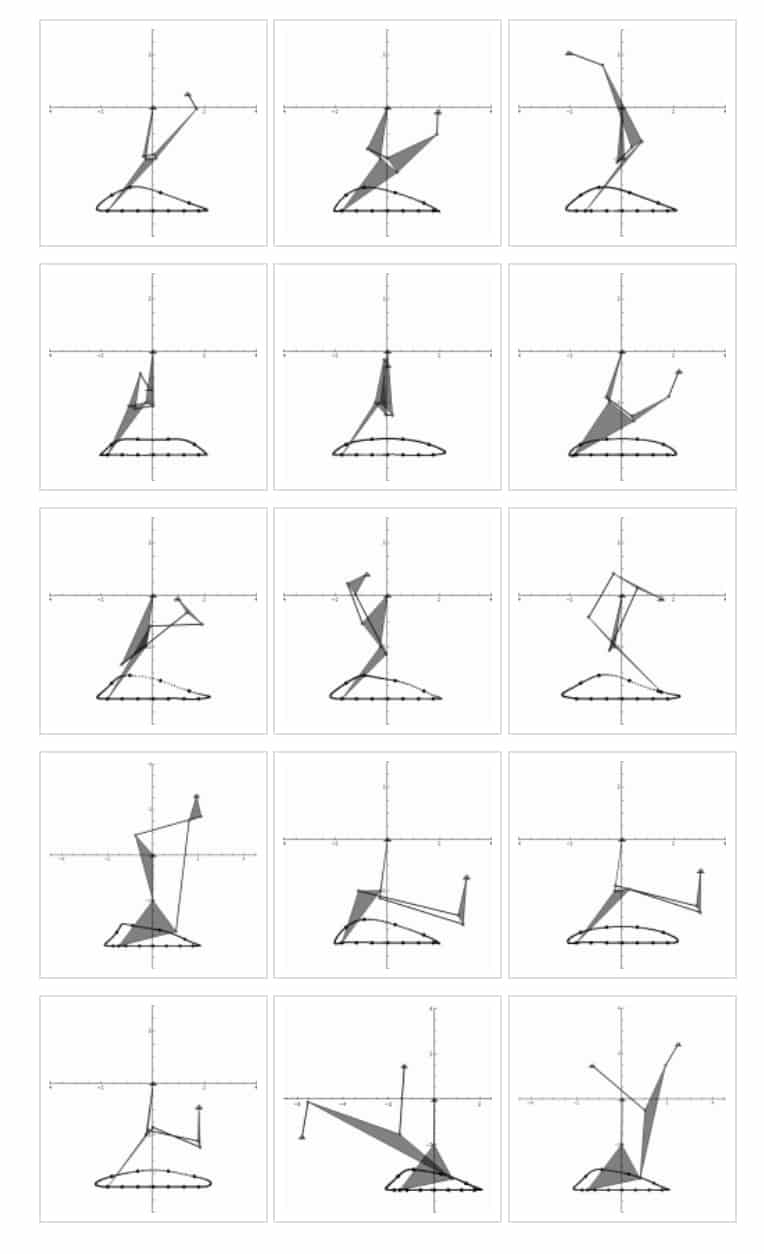
An outcome of Mark Plecnik’s research on the kinematic synthesis of six-bar linkages is a variety of designs for the leg mechanisms of small walking machines.
We hope to build this walker over the summer. It has one drive motor on each side:
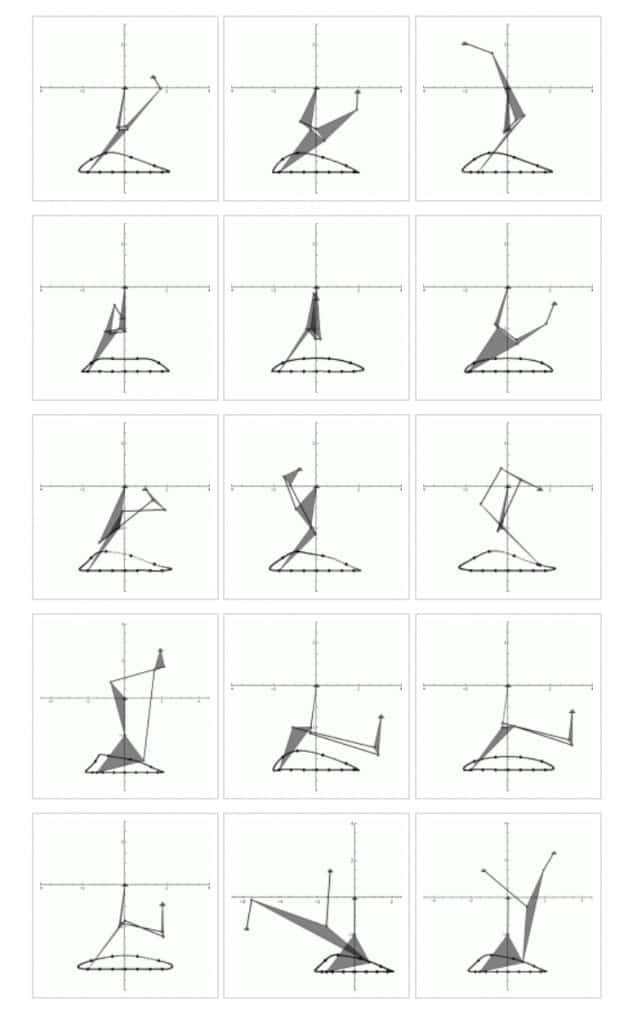
This is my favorite because it couples the legs on one side with a pantograph linkage. The leg joints are living hinges. and it seems this the entire leg system can be cut from a single sheet of plastic:
This is a design study for a walker with eight legs on one side, 16 total: