
Shape Changing Mechanisms Solve Design Problems
A design problem that engineers frequently encounter is a curve that changes shape. For instance, take a spoiler on a high performance car. To get optimal performance, the downward force should be increased as the car takes a turn. An ideal way to achieve this is to allow the spoiler to change shape. This is no simple design task because an engineer wants the spoiler to remain a spoiler and do its job at every intermediary stage as it changes shape. To use another example, you don’t ever want a wing to stop being a wing. But you might want to enable a wing to change its shape during flight.
Professor Andrew Murray, Associate Professor Dave Myszka, and Dave Perkins (all of University of Dayton), along with Associate Professor Jim Schmiedeler (of Notre Dame) and the students at University of Dayton’s Design of Innovative Machines Lab (DIMLab) are working on new technology to tackle these problems. Their work focuses on the theory and design of “morphing or adaptive structures” that can essentially change shape and still perform their function “through a wider range of operating conditions.” Design applications of this research include wings, extrusion dies, deformable mirrors for adaptive optics systems, morphing architectural structures, active aperture antennas, and (to come back down to Earth for a moment), pasta makers.
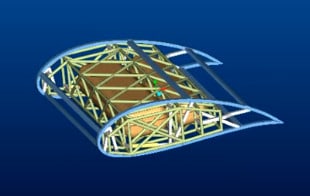
Shape-Changing Wing with Internal Structure
Die design is an interesting manufacturing application of this research. A die is used in a manufacturing process where melted plastic or other such material, like pasta dough, is forced through a die in order to “form a long part of uniform cross-section” like tubes, pipes, molding — and fusilli. Professor Murray and his colleagues and students have applied their research to designing a die that can change shape as material is fed through it, enabling manufacturers to create new innovative products at low cost compared to other currently available technology like molding.
For more information on this research, visit DIMLab. See video demonstrations of this technology here. For reference material, see Persinger, J., Shmeideler, J., Murray, A., 2009, “Synthesis of Planar Rigid-Body Mechanisms Approximating Shape Changes Defined by Closed Curves.” The spoiler and compliant wing featured in the videos in this article were engineered by Seb Krut.



