
Kinematic Synthesis of Mechanisms
 https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 17:12:212022-09-17 09:25:54Construction of a Skew Pantograph Leg Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 17:12:212022-09-17 09:25:54Construction of a Skew Pantograph Leg Mechanism https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 15:41:012022-09-17 09:25:54Construction of Klann-style Leg Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-28 15:41:012022-09-17 09:25:54Construction of Klann-style Leg Mechanism https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-26 13:51:452022-09-17 09:25:54Construction of a Translating Link for a Leg Mechanism
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-26 13:51:452022-09-17 09:25:54Construction of a Translating Link for a Leg Mechanism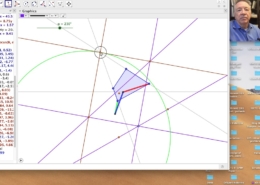 https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-23 10:38:022022-09-17 09:25:55Construction of the Cubic of Stationary Curvature for a Four-bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-23 10:38:022022-09-17 09:25:55Construction of the Cubic of Stationary Curvature for a Four-bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 22:12:412022-09-17 09:25:55Construction of the Inflection Circle for a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-4.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 22:12:412022-09-17 09:25:55Construction of the Inflection Circle for a Four-Bar Linkage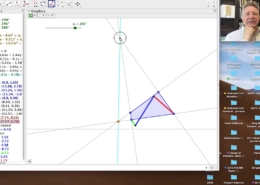 https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-5.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 17:13:402022-09-17 09:25:55Construction of the Canonical Coordinate System for a Four-Bar Linkage
https://mechanicaldesign101.com/wp-content/uploads/2019/04/maxresdefault-5.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-22 17:13:402022-09-17 09:25:55Construction of the Canonical Coordinate System for a Four-Bar Linkage https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-16-at-2.20.21-PM.jpg
740
1304
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-16 14:22:582019-05-25 12:08:24Walking Machine Class Projects: Ohio State ME 5751
https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-16-at-2.20.21-PM.jpg
740
1304
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-16 14:22:582019-05-25 12:08:24Walking Machine Class Projects: Ohio State ME 5751 https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-14 08:31:382022-09-17 09:25:55Sphinx and Sphere VR and the History of Kinematic Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-14 08:31:382022-09-17 09:25:55Sphinx and Sphere VR and the History of Kinematic Synthesis https://mechanicaldesign101.com/wp-content/uploads/2019/04/guide_map.jpg
768
1024
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-13 09:42:492019-05-26 12:17:56LINCAGES and the History of Kinematic Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2019/04/guide_map.jpg
768
1024
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-13 09:42:492019-05-26 12:17:56LINCAGES and the History of Kinematic Synthesis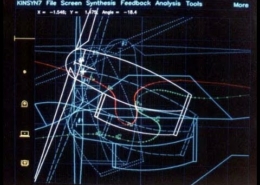 https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-12 16:58:422022-09-17 09:25:55KinSyn and the History of Kinematic Synthesis
https://mechanicaldesign101.com/wp-content/uploads/2019/04/hqdefault-1.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-12 16:58:422022-09-17 09:25:55KinSyn and the History of Kinematic Synthesis https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-10-at-10.55.22-AM.png
422
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-10 11:03:032019-05-25 12:13:41Strider and TrotBot at DIYWalkers.com
https://mechanicaldesign101.com/wp-content/uploads/2019/04/Screen-Shot-2019-04-10-at-10.55.22-AM.png
422
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-04-10 11:03:032019-05-25 12:13:41Strider and TrotBot at DIYWalkers.com JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Figure-8.1.png
1115
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:28:202019-05-25 12:14:49About Geogebra-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Figure-8.1.png
1115
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:28:202019-05-25 12:14:49About Geogebra-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-6-Title.jpg
943
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:20:142019-05-25 12:16:13Chapter 6 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-6-Title.jpg
943
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 22:20:142019-05-25 12:16:13Chapter 6 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-5-Title.jpg
1007
1333
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 20:23:422019-05-25 12:17:24Chapter 5 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-5-Title.jpg
1007
1333
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 20:23:422019-05-25 12:17:24Chapter 5 Animations-Kinematic Synthesis of Mechanisms JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-4-Title.png
983
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 16:08:542019-05-25 12:18:33Chapter 4 Animations-Kinematic Synthesis of Mechanisms
JMM
https://mechanicaldesign101.com/wp-content/uploads/2019/03/Chapter-4-Title.png
983
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2019-03-27 16:08:542019-05-25 12:18:33Chapter 4 Animations-Kinematic Synthesis of MechanismsMachine Design
 https://mechanicaldesign101.com/wp-content/uploads/2009/04/Timing-Belt-Theory.jpg
245
716
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-29 15:43:262017-01-05 23:10:15Timing belt theory
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Timing-Belt-Theory.jpg
245
716
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-29 15:43:262017-01-05 23:10:15Timing belt theory https://mechanicaldesign101.com/wp-content/uploads/2009/04/Gearing.png
284
667
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-29 05:12:542017-01-05 23:15:40Gear geometry
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Gearing.png
284
667
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-29 05:12:542017-01-05 23:15:40Gear geometry https://mechanicaldesign101.com/wp-content/uploads/2009/04/Colorado-Videos.jpg
678
1362
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-28 15:20:412022-07-08 19:28:22Mechanisms videos at Colorado State
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Colorado-Videos.jpg
678
1362
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-28 15:20:412022-07-08 19:28:22Mechanisms videos at Colorado State https://mechanicaldesign101.com/wp-content/uploads/2009/04/Fasteners.jpg
438
759
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-04-26 06:34:542022-07-08 19:27:27Machine screw dimensions
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Fasteners.jpg
438
759
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-04-26 06:34:542022-07-08 19:27:27Machine screw dimensions https://mechanicaldesign101.com/wp-content/uploads/2009/04/Diesel-Engine-Animation.jpg
453
838
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-04-25 22:47:492017-01-25 08:25:45Diesel Engine Animations
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Diesel-Engine-Animation.jpg
453
838
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-04-25 22:47:492017-01-25 08:25:45Diesel Engine Animations https://mechanicaldesign101.com/wp-content/uploads/2009/04/Engine-Animation.jpg
584
837
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-04-25 22:28:592017-01-25 08:26:39Engine Animation
https://mechanicaldesign101.com/wp-content/uploads/2009/04/Engine-Animation.jpg
584
837
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2009-04-25 22:28:592017-01-25 08:26:39Engine AnimationLecture Notes
 https://mechanicaldesign101.com/wp-content/uploads/2009/04/KMODDL-Tour.jpg
798
1108
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-26 23:51:342017-01-08 10:04:37Kinematic models for design
https://mechanicaldesign101.com/wp-content/uploads/2009/04/KMODDL-Tour.jpg
798
1108
Michael
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Michael2009-04-26 23:51:342017-01-08 10:04:37Kinematic models for designHave a linkage design challenge? We can help.
 Contact us on this feedback form. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks.
Contact us on this feedback form. We look forward to providing our MechGen synthesis software to simplify your linkage design process in SolidWorks.
Linkage Synthesis Theory
The mathematical synthesis of linkage movement provides a powerful tool for invention. However, the specified task may not have useful solutions, and the search for successful tasks can be discouraging.
To address this, we automate the search and evaluation process within tolerance zones specified by the designer. These Mathematica notebooks implement our approach to finding defect-free four-bar linkage designs.
RR Constraint Synthesis for Function Generation

Synthesis of an RR Constraint
An important technique in kinematic synthesis is the design of an RR constraint that controls the movement of two joints of an existing serial chain. For a given RR serial chain, like OA shown above, we can specify its movement through five required task positions. This provides the information needed to design an RR constraint, GW above, that ensures the system moves through the required task positions.
This technique is called function generation in the kinematics synthesis literature, because the synthesized RR constraint maintains a specified relationship between the joint angles alpha and beta at joints O and A.

Select this link to download our Mathematica notebook: RR-Constraint Synthesis. It uses a given RR chain and the associated task to determine tolerance zones, where it searches for defect-free designs. As above, this file may download as text file so remove the .txt extension, then it should be readable by Mathematica. If you have any questions, please contact me.
Five-Position Synthesis of a Four-bar Linkage
Here we show a four-bar linkage designed to guide the coupler through five required task positions.
Please download and try our updated Mathematica notebook: Five-Position Synthesis. It searches in the vicinity of the required task for sets of positions that yield defect-free four-bar linkages. It may download as textfile so remove the .txt extension, then it should be readable by Mathematica.
The video below shows the operation of this notebook.
If you have any problems or advice, please contact me.