
Superluminal Chapter 5
David finds Qishu to be more than he expected in Chapter 5 of R. W. Frost’s Superluminal.

David finds Qishu to be more than he expected in Chapter 5 of R. W. Frost’s Superluminal.

Jeff Glabe designed this six-bar linkage to move through six task positions while maintaining a parallel orientation. This required the calculation of 55,000 linkages to find 26 that work. This one has the additional feature that it is operated by a rotating crank (the red link). The video is a collaboration of Jeff Glabe and Benjamin Liu.

This introduction to the graduate course ME 322 Kinematic Synthesis of Mechanisms shows the potential for design innovation using a mathematical formulation to compute the dimensions of a device from its required task, literally the calculation of its form from the desired function.
More notes on Kinematic Synthesis Also see my book Kinematic Synthesis of Mechanisms: a project based approach
These notes for the Stanford University graduate course ME 322 Kinematic Synthesis of Mechanisms present the curvature properties of point trajectories in a planar moving body such as the coupler link of a four-bar linkage.
Update: December 13, 2017. These notes have been revised to use the notation for the components of the pole acceleration and rate of change of acceleration to match Bottema and Roth’s Theoretical Kinematics.

These notes for the Stanford University course ME 322 Kinematic Synthesis of Mechanisms introduce the synthesis of a four-bar linkages that guide the coupler link through two and three specified task positions.
More notes on Kinematic Synthesis Also see my book Kinematic Synthesis of Mechanisms: a project based approach
December 12, 2017. These notes have been revised to introduce Sandor and Erdman’s formulas for linkage synthesis which solve for the input and output cranks. This provides a nice pairing with the related equations that are solved for the fixed and moving pivots, directly.

These notes have been prepared for the Stanford University graduate course ME 322 Kinematic Synthesis of Mechanisms. This first set details the position and velocity analysis of a four-bar linkage.
Update: December 12, 2017. These notes have been revised to represent rotation matrices using boldfaced letters. Remarkably, because 2×2 matrices commute this allows these matrices to be replaced by complex exponentials and the coordinate vectors to be replaced by complex numbers and the derivations and calculations do not change.

David finds that surpassing Siggy and Kwan to get to Satellite 9 may have benefits he did not expect.
More of R. W. Frost’s story following David Minor’s uneasy relationship with MitsukoTek Corporation as he is drawn into helping their wayward Satellite 9.
(Read by scrolling the image or by using the page down and up buttons at the bottom.)
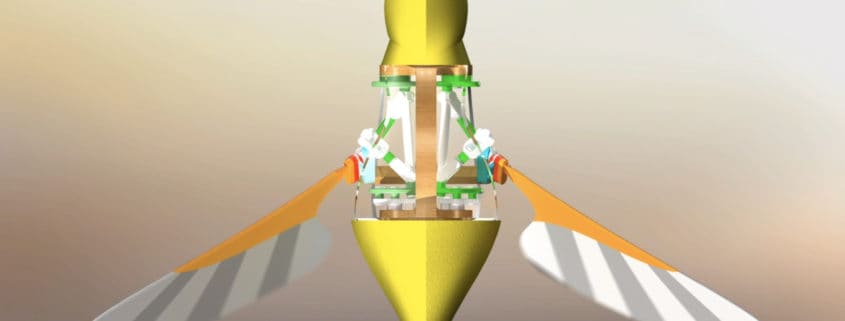
This spatial six-bar linkage provides a compact flapping wing mechanism for a hovering micro air vehicle that controls both swing and pitch movements. It is the result of a collaboration between Benjamin Liu and Peter Wang.
Superluminal, the new book by R. W. Frost, follows David Minor’s experiences with MitsukoTek Corporation’s troublesome Satellite 9. It is the year 2035 and a new technology has swept the globe…
(Read by scrolling the image or by using the page down and up buttons at the bottom.)
 MDA
MDA