This animation by Yang Liu is inspired by the mechanical Fourier synthesizer described by Dayton Miller, see A 32-element harmonic synthesizer.
This mechanical system combines the terms of a Fourier approximation of the batman curve found on Wolfram.com. The video below shows this device draws the batman curve.
This article by Jon Hauenstein with me for SIAM News (Society for Industrial and Applied Mathematics) describes research by Mark Plecnik in the computer-aided design of linkages to provide mechanical movement of a bird’s wing. Here is Mark’s video of the his wing flapping mechanism.
This mechanical system was designed by Yang Liu to trace the shape of a heart. The work is inspired by the mechanical 32-element harmonic synthesizer described by Dayton Miller in the 1916 article in the Journal of the Franklin Institute.
Michael Sutherland and his team at Zennen Engineering designed this full-size folding bicycle that has a dramatically different folding action from current designs.
Zennen Engineering has a new concept that they are kind enough to say was inspired by our UCI Folding Structure. This new design rotates the rear wheel support around the bottom bracket, and folds the front forks against the down tube and seat tube to form a compact package. It is a unique movement.
Jon Stokes, in our Robotics and Automation Lab, helped by adding the four-bar function generator to combine the two folding actions. It is a great concept, and it will be interesting to see if it achieves commercial success.
Montague Bikes provides a popular line folding full sized bicycles, which fold sideways around the seat tube.
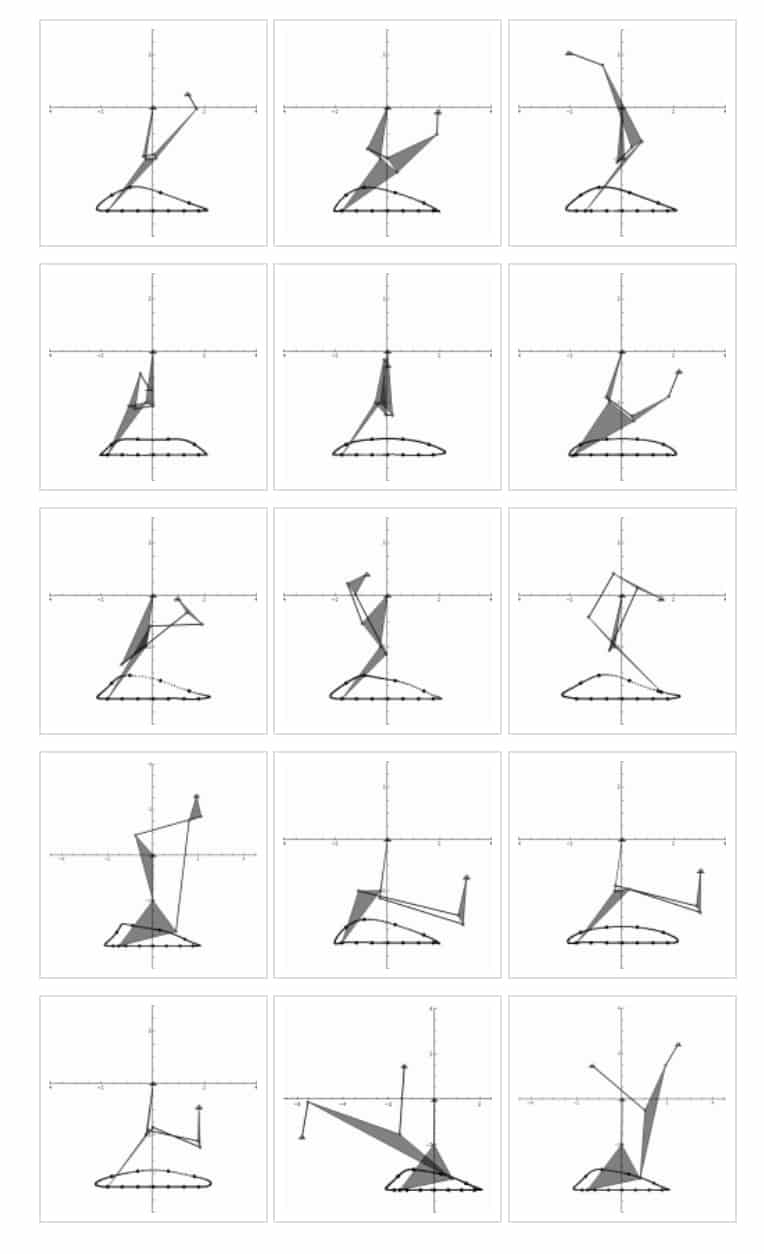
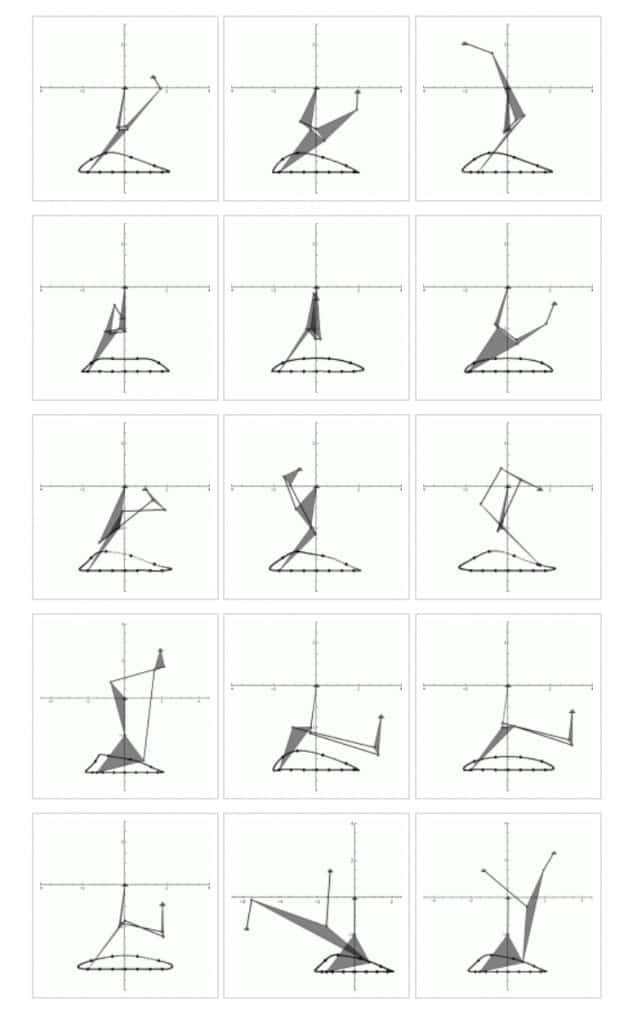
Lawrence Funke and Prof. James Schmiedeler of the University of Notre Dame Locomotion and Biomechanics Lab show that the movement of a morphing linkage through its target profiles can be improved by coordinating actuation of the sub-chains. This was presented at the Mechanisms and Robotics Conference which was part of the 2015 ASME Design Engineering Technical Conferences, August 2-5, in Boston, MA. The video below shows the improvement obtained by moving from 1 to 3 coordinated actuators.
Prof. Andrew Murray and his team at the Design of Innovative Machines Laboratory have developed a dynamic extrusion die that changes shape while in operation. This provides a new capability for rapid manufacture of innovative geometry for metal and plastic bars, channels, hoses, and more. For more information see his laboratory website, University of Dayton DIMLab.
This video provides an extreme introduction to the DIM Lab at the University of Dayton.
https://mechanicaldesign101.com/wp-content/uploads/2015/07/Fourbar-extrusion.png8921600Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2015-07-30 16:30:382022-09-17 09:29:49A four-bar linkage provides a shape changing extrusion die
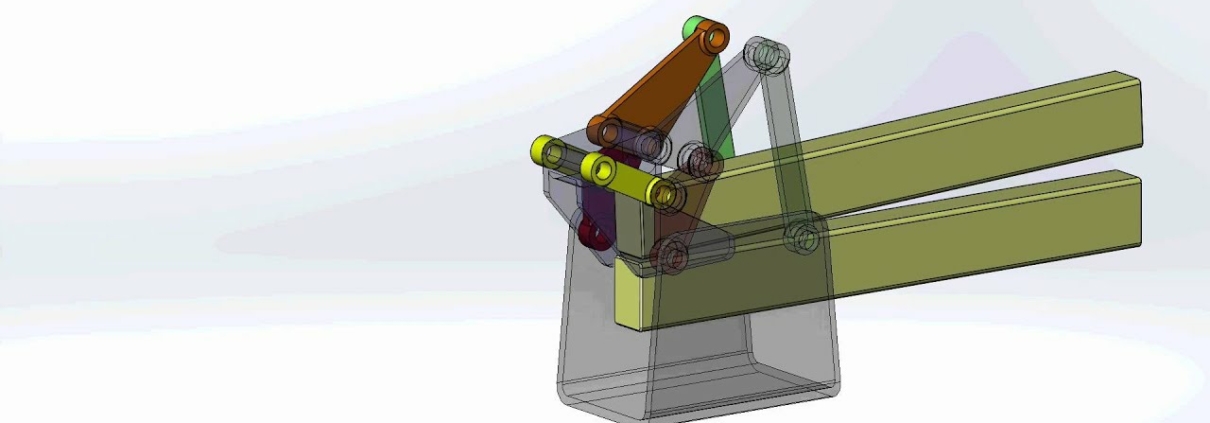
An outcome of Mark Plecnik’s research on the kinematic synthesis of six-bar linkages is a variety of designs for the leg mechanisms of small walking machines.
We hope to build this walker over the summer. It has one drive motor on each side:
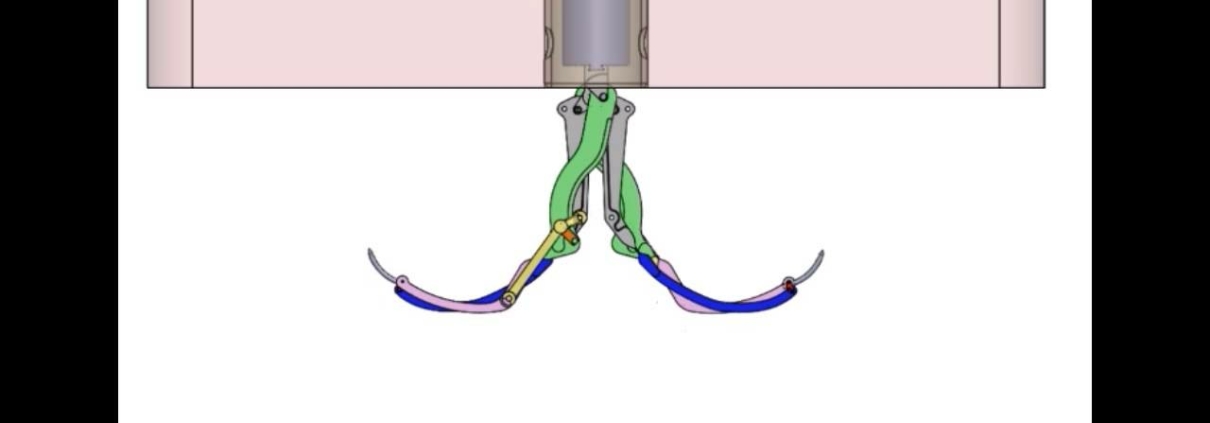
This is my favorite because it couples the legs on one side with a pantograph linkage. The leg joints are living hinges. and it seems this the entire leg system can be cut from a single sheet of plastic:
This is a design study for a walker with eight legs on one side, 16 total:
This is a little more compact version of the six-bar folding linkage that Kaustubh Sonawale found using MechGen 3.0.
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-1.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2015-03-12 20:02:092022-09-17 09:25:55Another version of the six-bar folding linkage
This six-bar linkage was designed to deploy and stow a structure. It was developed by Kaustubh Sonawale to demonstrate the capabilities of MechGen 3.0.
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-2.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2015-03-12 10:01:052022-09-17 09:25:55Six-bar linkage folds a structure
This port closure tool curls back on itself to provide internal stitches to close a trocar port used for non-invasive surgery. This is the result of a collaboration between Kaustubh Sonawale and Jon Stokes.
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-3.jpg7201280Prof. McCarthyhttps://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.pngProf. McCarthy2015-03-08 15:47:212022-09-17 09:25:55Eight-bar Port Closure Tool