Eight-bar motion amplifier
Kaustubh Sonawale and Yang Liu worked together on this design study for a micro-mechanical motion amplifier. It is an interconnected set of three eight-bar linkages.

Kaustubh Sonawale and Yang Liu worked together on this design study for a micro-mechanical motion amplifier. It is an interconnected set of three eight-bar linkages.
Until yesterday, my iBooks Introduction to Theoretical Kinematics and Kinematics and Polynomials were available only on the iPad, but now with OSX Mavericks they are available on any Mac. Please give it a try. You can download a sample at this link: Kinematics and Polynomials sample.

Six-bar linkages
Our paper Numerical Synthesis of Six-bar Linkages for Mechanical Computation provides the mathematical theory that underlies the synthesis of a six-bar linkage with an input-output relationship that approximates a specified function. This describes how the Stephenson III six-bar linkage that sets the elevation for a ballistic trajectory was designed.
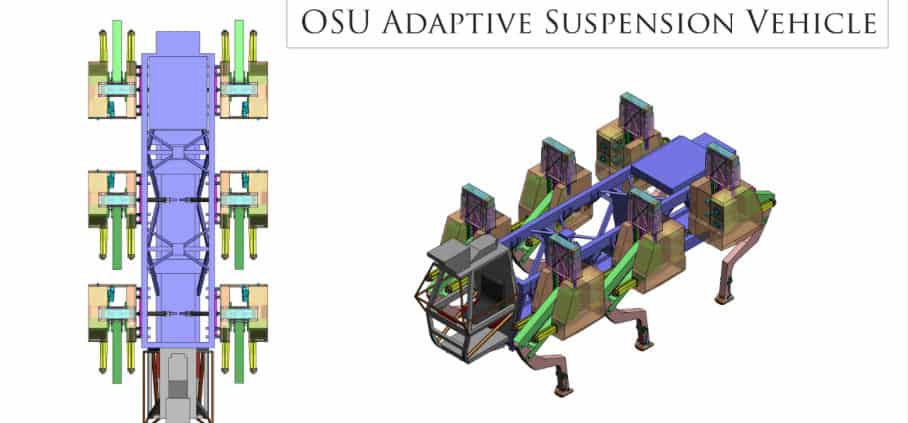
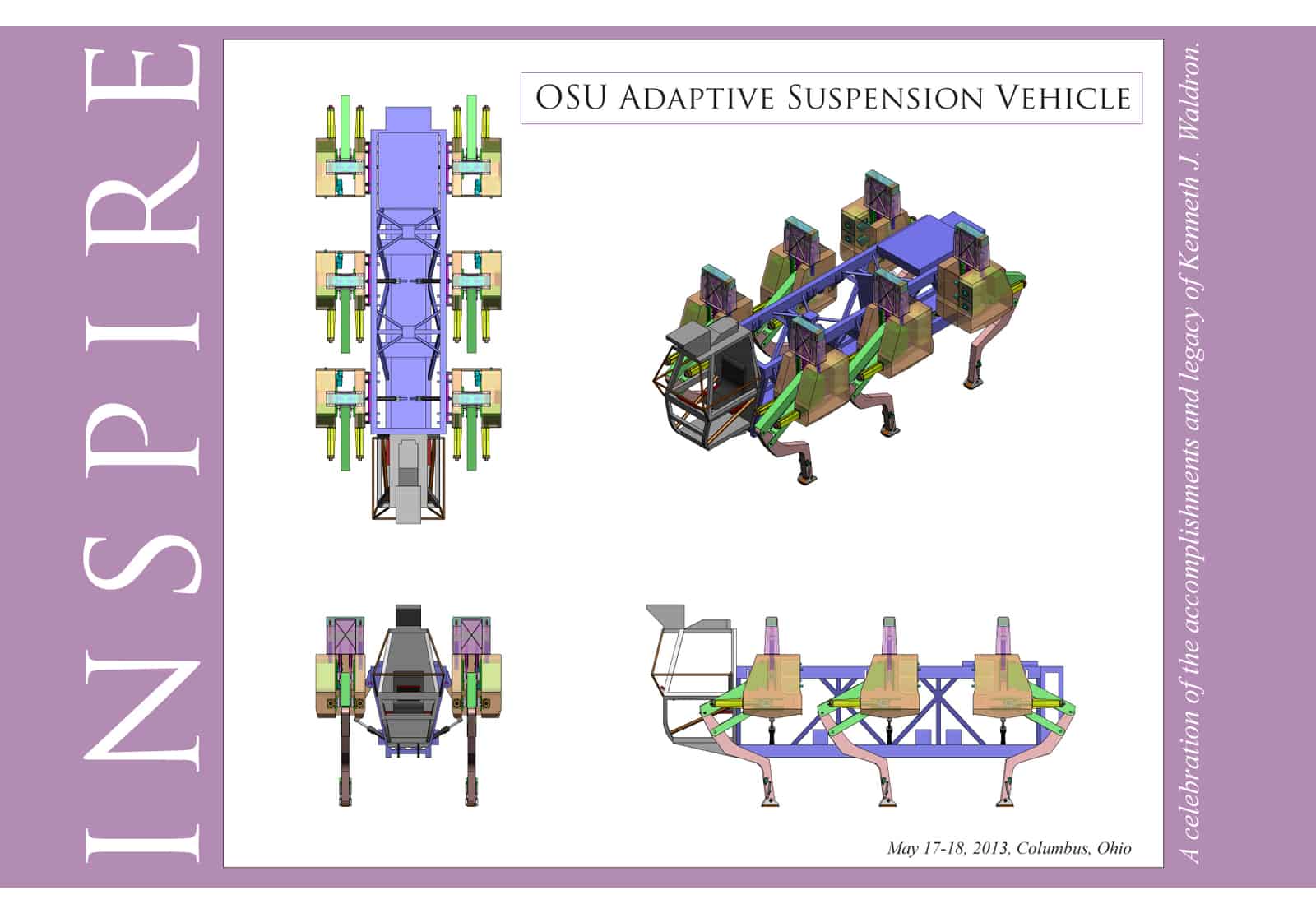
Waldron Inspires
This poster was prepared as a gift to Ken Waldron on his 70th birthday and given to him at a conference organized in his honor. Anuj Taneja generated the SolidWorks model in 2006 from the original drawings of the Adaptive Suspension Vehicle. I recently found the electronic files and Kaustubh Sonawale generated the four-view drawing. The ASV is an important feat of engineering and the stories shared by those who worked on it were wonderful.

Introduction to Theoretical Kinematics
My 1990 book is now on-line as an iBook. It is available as of March 31, 2013. This 2013 version has corrections to errors and language, and includes a glossary and animations of various linkage systems. I hope you like it.
You can see it at the link: Introduction to Theoretical Kinematics.

Cover 21st Century Kinematics
The presenters for the 2012 IDETC/NSF Workshop on 21st Century Kinematics, August 11-12, 2012, Chicago, Il, have gathered background information into this book published by Springer. It is a guided compilation of work by the presenters found in their recent papers and books. We are grateful to ASME, IJRR, Robotica and Springer for the permission to reprint these excerpts.

Geometric Design of Linkages, second edition
I am pleased to say that the second edition of my book, Geometric Design of Linkages, is now available, and I have to express my sincere gratitude to my co-author GimSong Soh, who helped make it happen.
You can find more information at the Springer Verlag web-page, GDL on Springer.com.
It is also already on Google Books, you can see it at the link GDL on books.google.com.
Mathematica File for Linkage Synthesis
Select this link to download our Mathematica notebook for four-bar linkage synthesis. It will download as a textfile, so delete the .txt extension, then Mathematica should be able to read it. If you have an problems, please contact me.
This notebook is an example of the type of programs that I use to teach mechanism theory. In my courses students generate their own notebooks like this for the analysis and synthesis of various linkages. The program is not optimized in any way.
This particular notebook does provide a new capability. It uses a randomized search in tolerance zones near the required task positions to find linkages that do not have well-known defects. Cut and paste the text file output into our Mechanism Generator software to automatically generate a SolidWorks model of the linkage and task.

This video shows the operation of a cam-driven toy artist.
I found it on Dug North’s Automata/Automaton blog, http://dugnorth.com/blog/
My class notes on cam-follower systems can be downloaded at the link: http://synthetica.eng.uci.edu/mechanicaldesign101/McCarthyNotes-Cams2.pdf
