
DESIGN INNOVATION
 https://mechanicaldesign101.com/wp-content/uploads/2016/07/LinkagePatents.jpg
567
1258
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
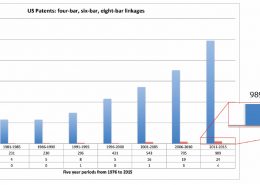
Prof. McCarthy2016-07-26 08:59:422017-04-14 13:51:58Want a patent? Try a Six-bar linkage
https://mechanicaldesign101.com/wp-content/uploads/2016/07/LinkagePatents.jpg
567
1258
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2016-07-26 08:59:422017-04-14 13:51:58Want a patent? Try a Six-bar linkage https://mechanicaldesign101.com/wp-content/uploads/2015/11/SIAMnews-e1469999783791.jpg
285
400
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-11-20 08:40:562017-04-14 13:54:48SIAM News: Biologically inspired linkage design
https://mechanicaldesign101.com/wp-content/uploads/2015/11/SIAMnews-e1469999783791.jpg
285
400
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-11-20 08:40:562017-04-14 13:54:48SIAM News: Biologically inspired linkage design https://mechanicaldesign101.com/wp-content/uploads/2015/08/Folding-Bicycle.png
367
649
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-14 16:57:512017-04-14 13:56:47Full Size Folding Bicycle
https://mechanicaldesign101.com/wp-content/uploads/2015/08/Folding-Bicycle.png
367
649
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-14 16:57:512017-04-14 13:56:47Full Size Folding Bicycle https://mechanicaldesign101.com/wp-content/uploads/2015/08/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-12 09:16:002022-09-17 09:25:55Micro-Linkages for a Compliant Material
https://mechanicaldesign101.com/wp-content/uploads/2015/08/hqdefault.jpg
360
480
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-12 09:16:002022-09-17 09:25:55Micro-Linkages for a Compliant Material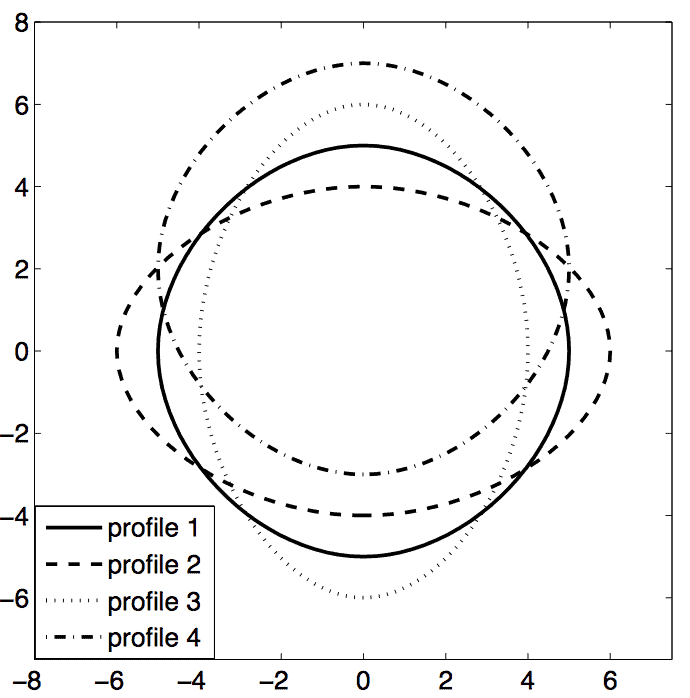 https://mechanicaldesign101.com/wp-content/uploads/2015/08/Target-Profiles-for-Morphing-Linkage.png
698
690
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 08:11:562017-04-14 14:00:12Actuating Morphing Linkages
https://mechanicaldesign101.com/wp-content/uploads/2015/08/Target-Profiles-for-Morphing-Linkage.png
698
690
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 08:11:562017-04-14 14:00:12Actuating Morphing Linkages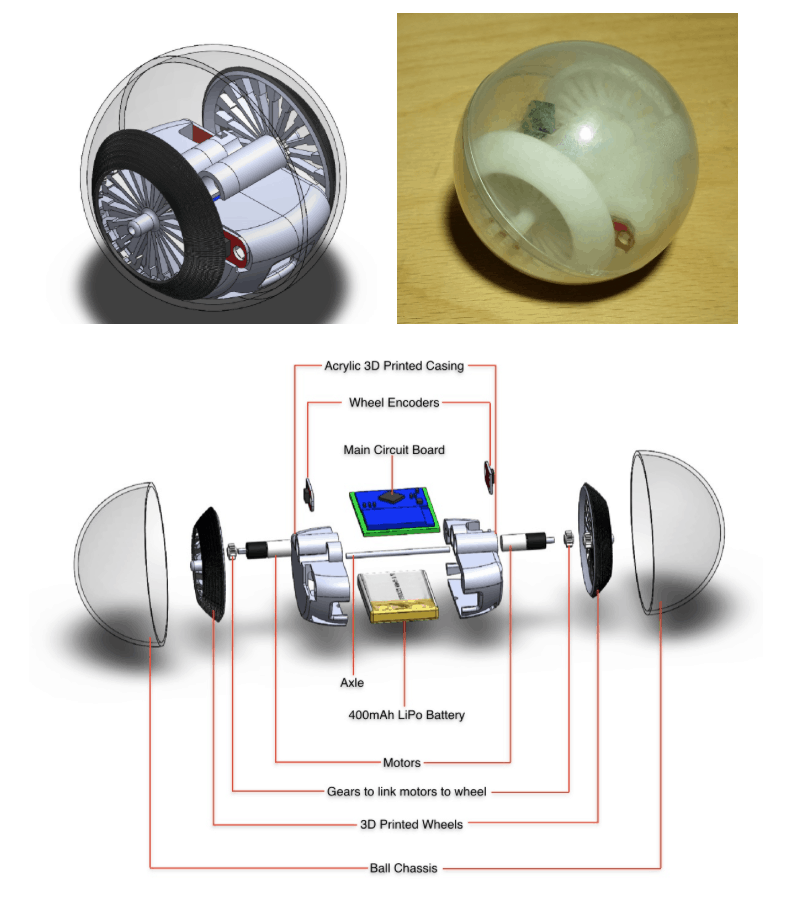 https://mechanicaldesign101.com/wp-content/uploads/2015/08/Virgo-2-SUTD.png
906
810
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 07:13:422022-09-17 09:28:25Rolling Robot at SUTD
https://mechanicaldesign101.com/wp-content/uploads/2015/08/Virgo-2-SUTD.png
906
810
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-11 07:13:422022-09-17 09:28:25Rolling Robot at SUTD https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-09 09:35:292022-09-17 09:25:55Tensegrity Robotics at UC Berkeley
https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault-1.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-09 09:35:292022-09-17 09:25:55Tensegrity Robotics at UC Berkeley https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-09 09:17:482022-09-17 09:25:55Origami Art at BYU
https://mechanicaldesign101.com/wp-content/uploads/2015/08/maxresdefault-2.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-08-09 09:17:482022-09-17 09:25:55Origami Art at BYU https://mechanicaldesign101.com/wp-content/uploads/2015/07/Fourbar-extrusion.png
892
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-30 16:30:382022-09-17 09:29:49A four-bar linkage provides a shape changing extrusion die
https://mechanicaldesign101.com/wp-content/uploads/2015/07/Fourbar-extrusion.png
892
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-30 16:30:382022-09-17 09:29:49A four-bar linkage provides a shape changing extrusion die https://mechanicaldesign101.com/wp-content/uploads/2015/07/MK1-Schematic.jpg
570
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-14 12:45:432022-07-08 19:34:01MK.1 Mechanical Computer
https://mechanicaldesign101.com/wp-content/uploads/2015/07/MK1-Schematic.jpg
570
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-14 12:45:432022-07-08 19:34:01MK.1 Mechanical Computer https://mechanicaldesign101.com/wp-content/uploads/2015/07/Bernie-Roth.jpg
583
1102
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-04 14:39:252017-04-14 14:09:44Bernard Roth: The Achievement Habit
https://mechanicaldesign101.com/wp-content/uploads/2015/07/Bernie-Roth.jpg
583
1102
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-07-04 14:39:252017-04-14 14:09:44Bernard Roth: The Achievement Habit https://mechanicaldesign101.com/wp-content/uploads/2015/05/RaceLabTV.jpg
1312
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-30 10:20:432022-09-17 09:31:48RaceLab.tv wants to follow FSAE Teams
https://mechanicaldesign101.com/wp-content/uploads/2015/05/RaceLabTV.jpg
1312
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-30 10:20:432022-09-17 09:31:48RaceLab.tv wants to follow FSAE Teams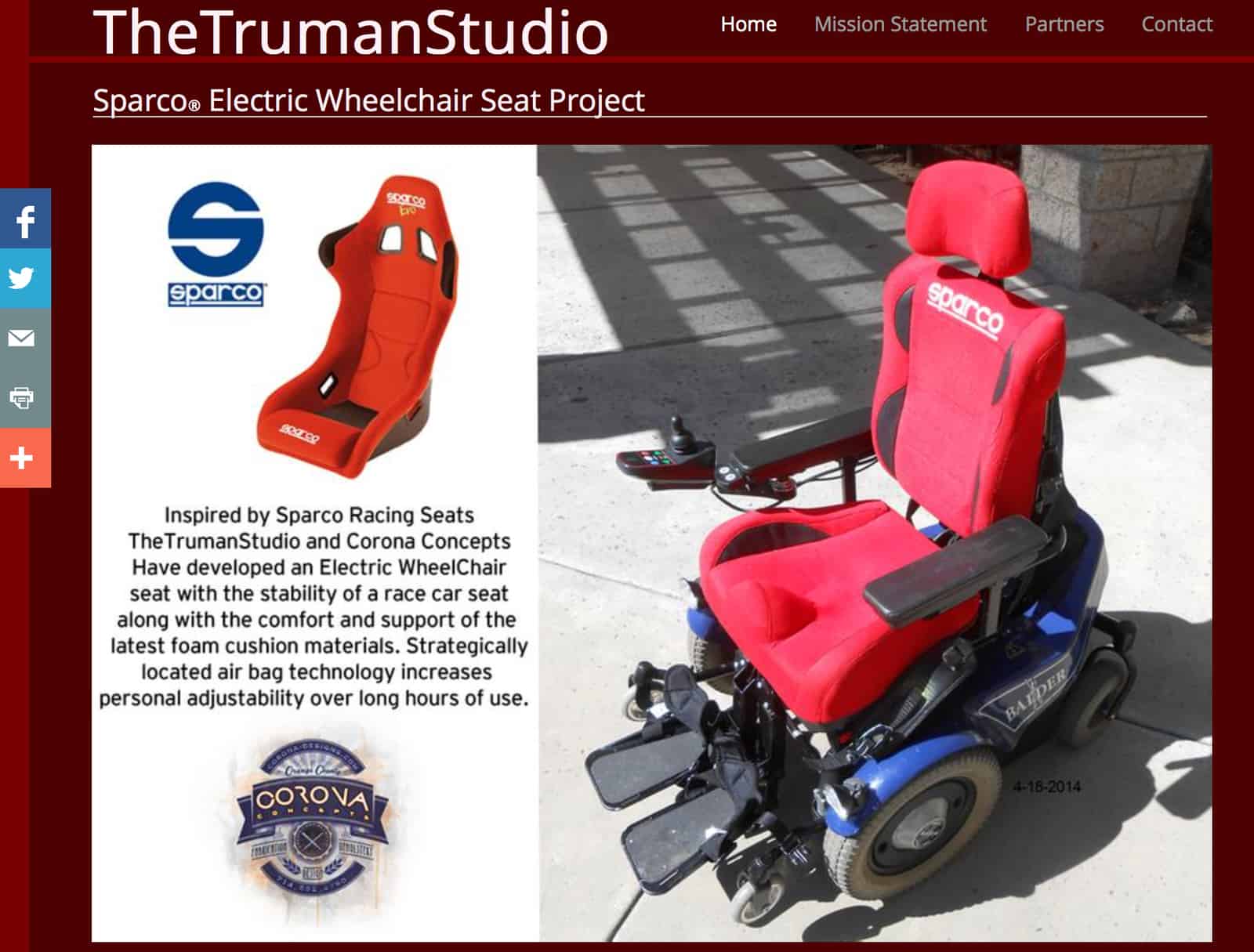 https://mechanicaldesign101.com/wp-content/uploads/2015/05/TrumanStudio.jpg
1215
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-11 07:37:172022-07-08 20:11:04Wheelchair Seating and Racecar Engineering
https://mechanicaldesign101.com/wp-content/uploads/2015/05/TrumanStudio.jpg
1215
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-11 07:37:172022-07-08 20:11:04Wheelchair Seating and Racecar Engineering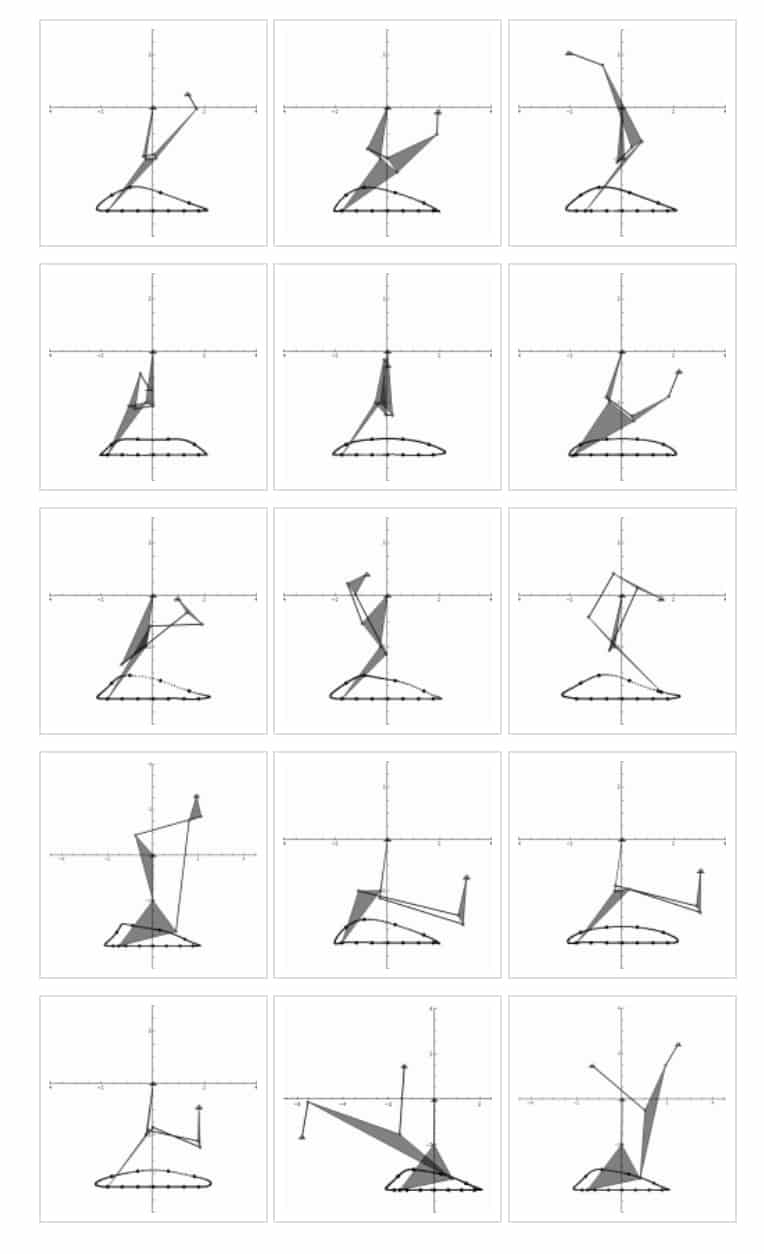 https://mechanicaldesign101.com/wp-content/uploads/2015/05/LegMechanisms.jpg
1254
764
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-01 08:34:182022-09-17 09:33:57Walking Machines
https://mechanicaldesign101.com/wp-content/uploads/2015/05/LegMechanisms.jpg
1254
764
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-05-01 08:34:182022-09-17 09:33:57Walking Machines https://mechanicaldesign101.com/wp-content/uploads/2015/06/MechGenSP.jpg
1200
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-04-04 09:54:012017-04-14 14:19:45MechGen Suspension
https://mechanicaldesign101.com/wp-content/uploads/2015/06/MechGenSP.jpg
1200
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-04-04 09:54:012017-04-14 14:19:45MechGen Suspension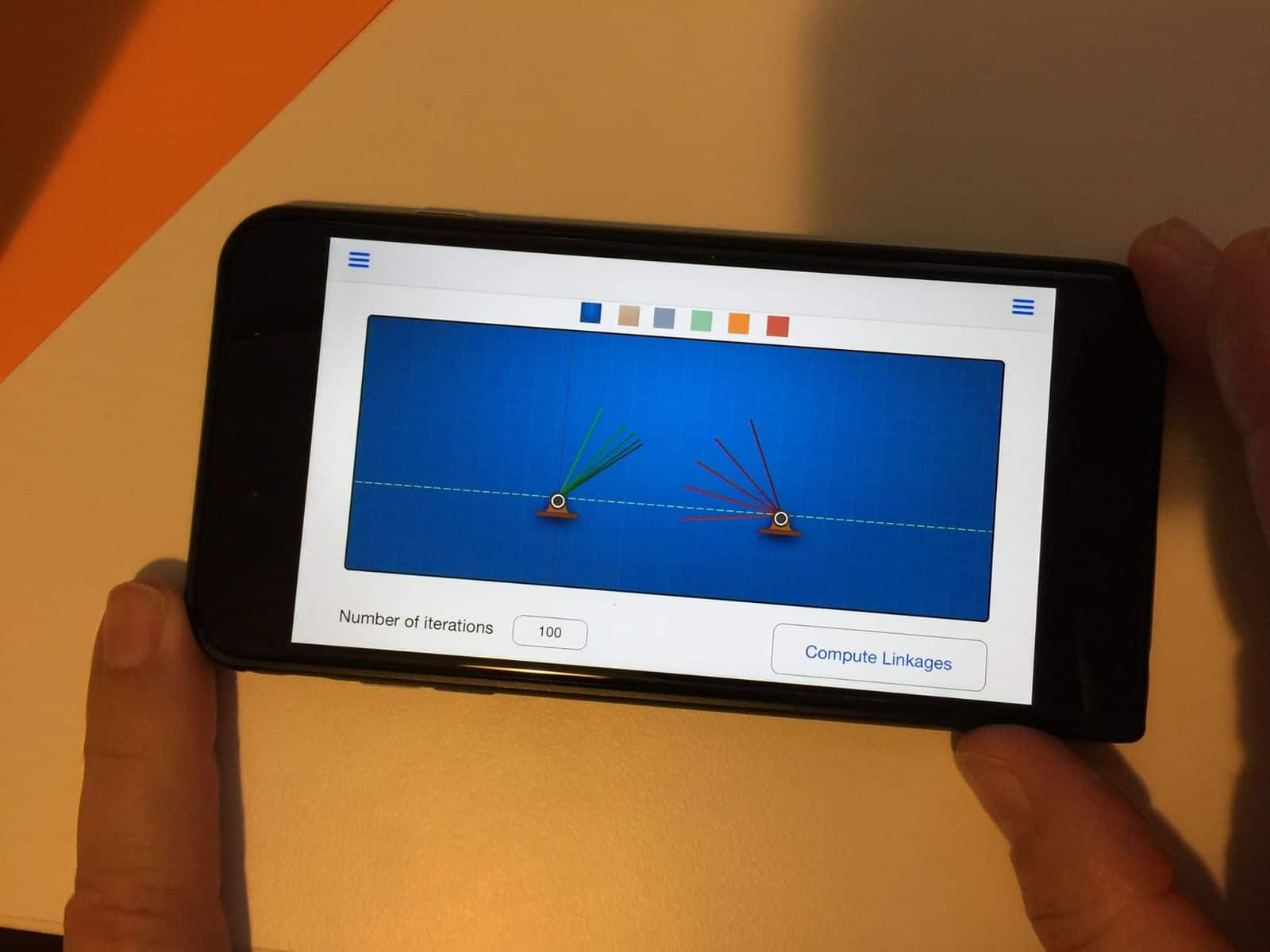 https://mechanicaldesign101.com/wp-content/uploads/2015/03/MechGen-on-iPhone.jpg
1200
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-30 07:28:252017-04-14 14:20:21MechGen FG is on the iPhone
https://mechanicaldesign101.com/wp-content/uploads/2015/03/MechGen-on-iPhone.jpg
1200
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-30 07:28:252017-04-14 14:20:21MechGen FG is on the iPhone https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-08 15:47:212022-09-17 09:25:55Eight-bar Port Closure Tool
https://mechanicaldesign101.com/wp-content/uploads/2015/03/maxresdefault-3.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-03-08 15:47:212022-09-17 09:25:55Eight-bar Port Closure Tool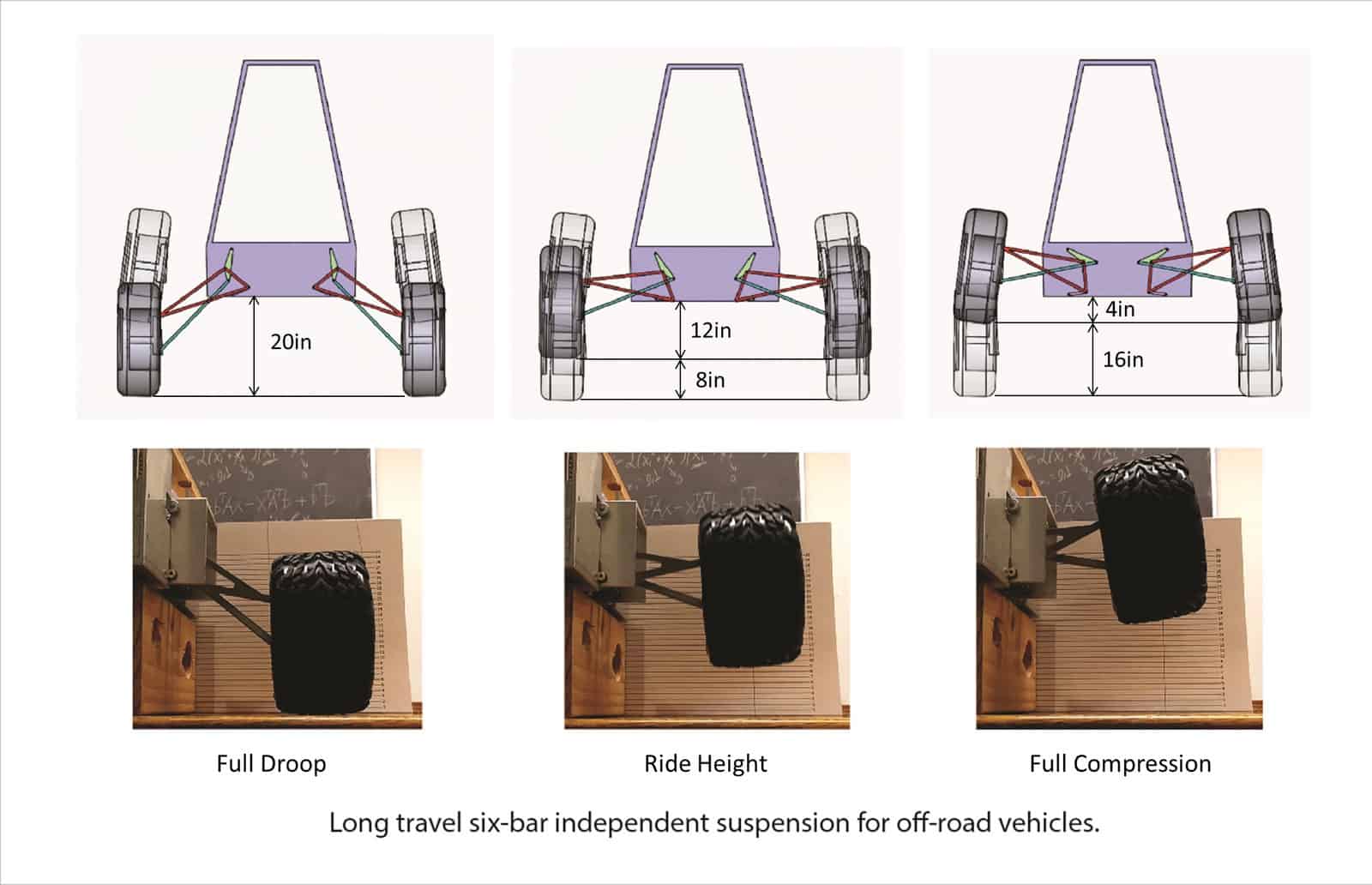 https://mechanicaldesign101.com/wp-content/uploads/2015/01/Long-travel-suspension.jpg
1032
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-01-04 22:00:492022-09-17 09:39:58Long-travel six-bar vehicle suspension
https://mechanicaldesign101.com/wp-content/uploads/2015/01/Long-travel-suspension.jpg
1032
1600
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2015-01-04 22:00:492022-09-17 09:39:58Long-travel six-bar vehicle suspension https://mechanicaldesign101.com/wp-content/uploads/2014/11/Athlete-Rover-Nasa.jpg
232
376
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-11-23 20:09:592022-07-08 19:33:21JPL’s ATHLETE Rover Walks, Rolls, and Slides
https://mechanicaldesign101.com/wp-content/uploads/2014/11/Athlete-Rover-Nasa.jpg
232
376
Chris McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Chris McCarthy2014-11-23 20:09:592022-07-08 19:33:21JPL’s ATHLETE Rover Walks, Rolls, and Slides https://mechanicaldesign101.com/wp-content/uploads/2014/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-11-14 09:42:512022-09-17 09:25:56Linkage Design for Wing Flapping
https://mechanicaldesign101.com/wp-content/uploads/2014/11/maxresdefault.jpg
720
1280
Prof. McCarthy
https://mechanicaldesign101.com/wp-content/uploads/2016/07/mechanical-design-101LOGOf.png
Prof. McCarthy2014-11-14 09:42:512022-09-17 09:25:56Linkage Design for Wing Flapping21st Century Kinematics
The NSF Workshop on 21st Century Kinematics at the 2012 ASME IDETC Conference in Chicago, IL on August 11-12, 2012 consisted of a series of presentations and a book of supporting material prepared by the workshop contributors.
The book is now available at amazon.com: 21st Century Kinematics–The 2012 NSF Workshop.
And here are the seven primary presentations given at the workshop.
- Computer-Aided Invention of Mechanisms and Robots. J. Michael McCarthy, Professor, University of California, Irvine.
- Mechanism Synthesis for Modeling Human Movement. Vincenzo Parenti-Castelli, Professor, University of Bologna.
- Algebraic Geometry and Kinematic Synthesis. Manfred Husty, Professor, University of Innsbruck.
- Kinematic Synthesis of Compliant Mechanisms. Larry Howell, Professor, Brigham Young University.
- Kinematics and Numerical Algebraic Geometry. Charles Wampler, Technical Fellow, General Motors Research and Development.
- Kinematic Analysis of Cable Robotic Systems. Vijay Kumar, Professor, University of Pennsylvania.
- Protein Kinematics. Kazem Kazerounian, Professor, University of Connecticut.
Colleagues joined in with two additional presentations:
- Development of Fast Pick and Place Robots. Jorge Angeles, Professor, McGill University.
- Kinestatic Analysis of Mechanisms with Compliant Elements. Carl Crane, Professor, University of Florida.
Many thanks to the contributors and the attendees for an outstanding workshop.
Update: The presentation links have been fixed.